Summary
This experiment investigates traffic signal timing. Plackett-Burman screening of green phase duration, cycle length, offset, pedestrian phase, left-turn phase, and sensor delay for throughput and average wait time.
The design varies 6 factors: green sec (sec), ranging from 15 to 60, cycle sec (sec), ranging from 60 to 150, offset pct (%), ranging from 0 to 50, ped phase sec (sec), ranging from 10 to 30, left turn sec (sec), ranging from 0 to 20, and sensor delay (sec), ranging from 1 to 5. The goal is to optimize 2 responses: throughput vph (veh/hr) (maximize) and avg wait sec (sec) (minimize). Fixed conditions held constant across all runs include intersection type = 4_way, time of day = peak.
A Plackett-Burman screening design was used to efficiently test 6 factors in only 8 runs. This design assumes interactions are negligible and focuses on identifying the most influential main effects.
Key Findings
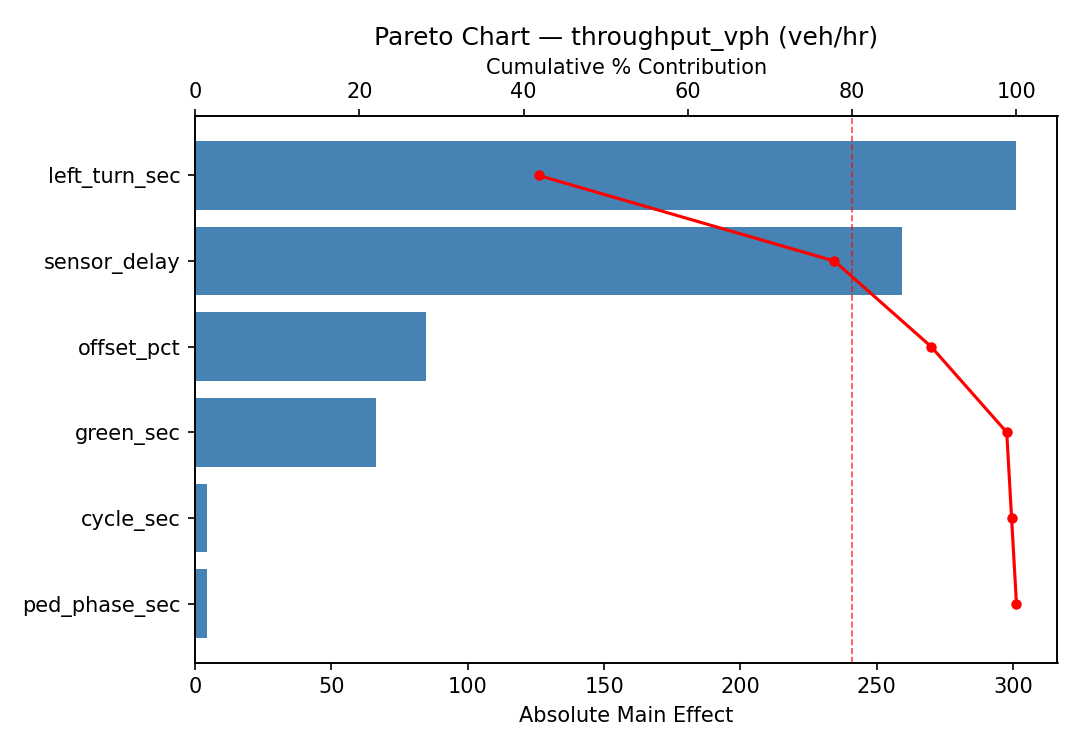
For throughput vph, the most influential factors were ped phase sec (36.5%), green sec (22.9%), left turn sec (18.9%). The best observed value was 1461.0 (at green sec = 60, cycle sec = 60, offset pct = 0).
For avg wait sec, the most influential factors were ped phase sec (33.5%), green sec (20.7%), left turn sec (17.3%). The best observed value was 25.0 (at green sec = 60, cycle sec = 60, offset pct = 0).
Recommended Next Steps
- Follow up with a response surface design (CCD or Box-Behnken) on the top 3–4 factors to model curvature and find the true optimum.
- Consider whether any fixed factors should be varied in a future study.
- The screening results can guide factor reduction — drop factors contributing less than 5% and re-run with a smaller, more focused design.
Experimental Setup
Factors
| Factor | Low | High | Unit |
|---|
green_sec | 15 | 60 | sec |
cycle_sec | 60 | 150 | sec |
offset_pct | 0 | 50 | % |
ped_phase_sec | 10 | 30 | sec |
left_turn_sec | 0 | 20 | sec |
sensor_delay | 1 | 5 | sec |
Fixed: intersection_type = 4_way, time_of_day = peak
Responses
| Response | Direction | Unit |
|---|
throughput_vph | ↑ maximize | veh/hr |
avg_wait_sec | ↓ minimize | sec |
Configuration
{
"metadata": {
"name": "Traffic Signal Timing",
"description": "Plackett-Burman screening of green phase duration, cycle length, offset, pedestrian phase, left-turn phase, and sensor delay for throughput and average wait time"
},
"factors": [
{
"name": "green_sec",
"levels": [
"15",
"60"
],
"type": "continuous",
"unit": "sec"
},
{
"name": "cycle_sec",
"levels": [
"60",
"150"
],
"type": "continuous",
"unit": "sec"
},
{
"name": "offset_pct",
"levels": [
"0",
"50"
],
"type": "continuous",
"unit": "%"
},
{
"name": "ped_phase_sec",
"levels": [
"10",
"30"
],
"type": "continuous",
"unit": "sec"
},
{
"name": "left_turn_sec",
"levels": [
"0",
"20"
],
"type": "continuous",
"unit": "sec"
},
{
"name": "sensor_delay",
"levels": [
"1",
"5"
],
"type": "continuous",
"unit": "sec"
}
],
"fixed_factors": {
"intersection_type": "4_way",
"time_of_day": "peak"
},
"responses": [
{
"name": "throughput_vph",
"optimize": "maximize",
"unit": "veh/hr"
},
{
"name": "avg_wait_sec",
"optimize": "minimize",
"unit": "sec"
}
],
"settings": {
"operation": "plackett_burman",
"test_script": "use_cases/122_traffic_signal_timing/sim.sh"
}
}
Experimental Matrix
The Plackett-Burman Design produces 8 runs. Each row is one experiment with specific factor settings.
| Run | green_sec | cycle_sec | offset_pct | ped_phase_sec | left_turn_sec | sensor_delay |
|---|
| 1 | 60 | 150 | 50 | 10 | 0 | 1 |
| 2 | 15 | 60 | 50 | 30 | 0 | 1 |
| 3 | 15 | 150 | 0 | 30 | 0 | 5 |
| 4 | 60 | 150 | 50 | 30 | 20 | 5 |
| 5 | 15 | 150 | 0 | 10 | 20 | 1 |
| 6 | 60 | 60 | 0 | 30 | 20 | 1 |
| 7 | 15 | 60 | 50 | 10 | 20 | 5 |
| 8 | 60 | 60 | 0 | 10 | 0 | 5 |
Step-by-Step Workflow
1
Preview the design
$ doe info --config use_cases/122_traffic_signal_timing/config.json
2
Generate the runner script
$ doe generate --config use_cases/122_traffic_signal_timing/config.json \
--output use_cases/122_traffic_signal_timing/results/run.sh --seed 42
3
Execute the experiments
$ bash use_cases/122_traffic_signal_timing/results/run.sh
4
Analyze results
$ doe analyze --config use_cases/122_traffic_signal_timing/config.json
5
Get optimization recommendations
$ doe optimize --config use_cases/122_traffic_signal_timing/config.json
6
Multi-objective optimization
With 2 competing responses, use --multi to find the best compromise via Derringer–Suich desirability.
$ doe optimize --config use_cases/122_traffic_signal_timing/config.json --multi
7
Generate the HTML report
$ doe report --config use_cases/122_traffic_signal_timing/config.json \
--output use_cases/122_traffic_signal_timing/results/report.html
Features Exercised
| Feature | Value |
|---|
| Design type | plackett_burman |
| Factor types | continuous (all 6) |
| Arg style | double-dash |
| Responses | 2 (throughput_vph ↑, avg_wait_sec ↓) |
| Total runs | 8 |
Analysis Results
Generated from actual experiment runs using the DOE Helper Tool.
Response: throughput_vph
Top factors: ped_phase_sec (36.5%), green_sec (22.9%), left_turn_sec (18.9%).
ANOVA
| Source | DF | SS | MS | F | p-value |
|---|
| Source | DF | SS | MS | F | p-value |
| green_sec | 1 | 71253.1250 | 71253.1250 | 2.937 | 0.1303 |
| cycle_sec | 1 | 8778.1250 | 8778.1250 | 0.362 | 0.5665 |
| offset_pct | 1 | 23436.1250 | 23436.1250 | 0.966 | 0.3584 |
| ped_phase_sec | 1 | 180901.1250 | 180901.1250 | 7.457 | 0.0293 |
| left_turn_sec | 1 | 48516.1250 | 48516.1250 | 2.000 | 0.2002 |
| sensor_delay | 1 | 45.1250 | 45.1250 | 0.002 | 0.9668 |
| green_sec*cycle_sec | 1 | 23436.1250 | 23436.1250 | 0.966 | 0.3584 |
| green_sec*offset_pct | 1 | 8778.1250 | 8778.1250 | 0.362 | 0.5665 |
| green_sec*ped_phase_sec | 1 | 48516.1250 | 48516.1250 | 2.000 | 0.2002 |
| green_sec*left_turn_sec | 1 | 180901.1250 | 180901.1250 | 7.457 | 0.0293 |
| green_sec*sensor_delay | 1 | 8911.1250 | 8911.1250 | 0.367 | 0.5636 |
| cycle_sec*offset_pct | 1 | 71253.1250 | 71253.1250 | 2.937 | 0.1303 |
| cycle_sec*ped_phase_sec | 1 | 45.1250 | 45.1250 | 0.002 | 0.9668 |
| cycle_sec*left_turn_sec | 1 | 8911.1250 | 8911.1250 | 0.367 | 0.5636 |
| cycle_sec*sensor_delay | 1 | 180901.1250 | 180901.1250 | 7.457 | 0.0293 |
| offset_pct*ped_phase_sec | 1 | 8911.1250 | 8911.1250 | 0.367 | 0.5636 |
| offset_pct*left_turn_sec | 1 | 45.1250 | 45.1250 | 0.002 | 0.9668 |
| offset_pct*sensor_delay | 1 | 48516.1250 | 48516.1250 | 2.000 | 0.2002 |
| ped_phase_sec*left_turn_sec | 1 | 71253.1250 | 71253.1250 | 2.937 | 0.1303 |
| ped_phase_sec*sensor_delay | 1 | 8778.1250 | 8778.1250 | 0.362 | 0.5665 |
| left_turn_sec*sensor_delay | 1 | 23436.1250 | 23436.1250 | 0.966 | 0.3584 |
| Error | (Lenth | PSE) | 7 | 169823.0625 | 24260.4375 |
| Total | 7 | 341840.8750 | 48834.4107 | | |
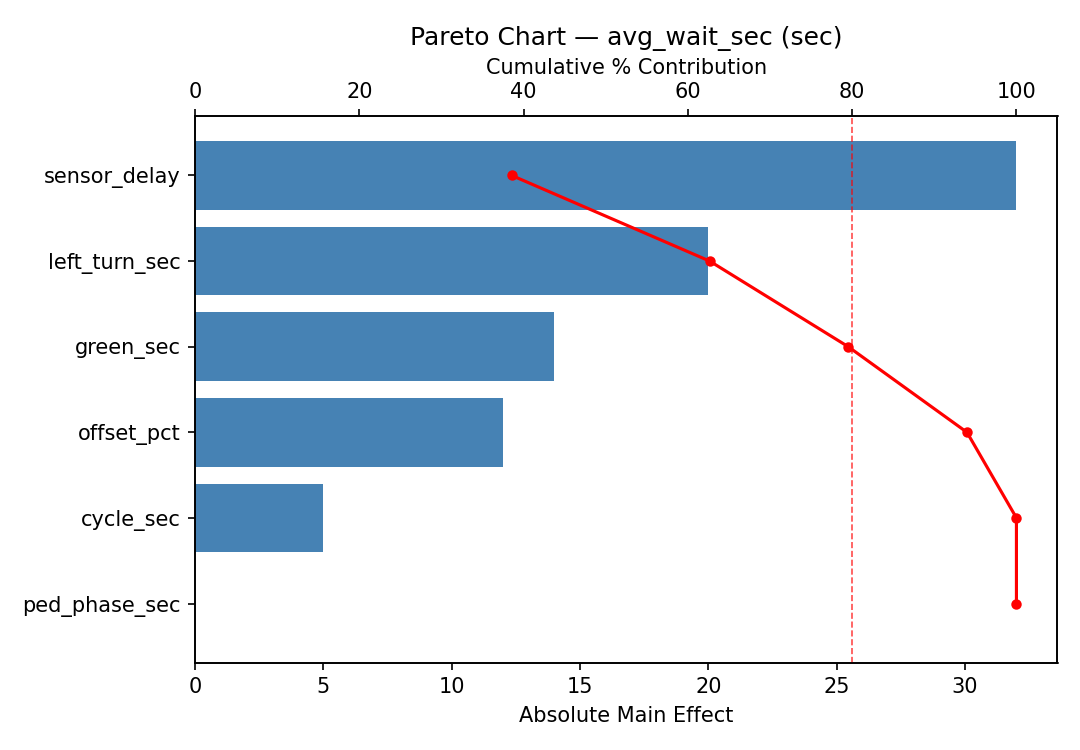
Pareto Chart
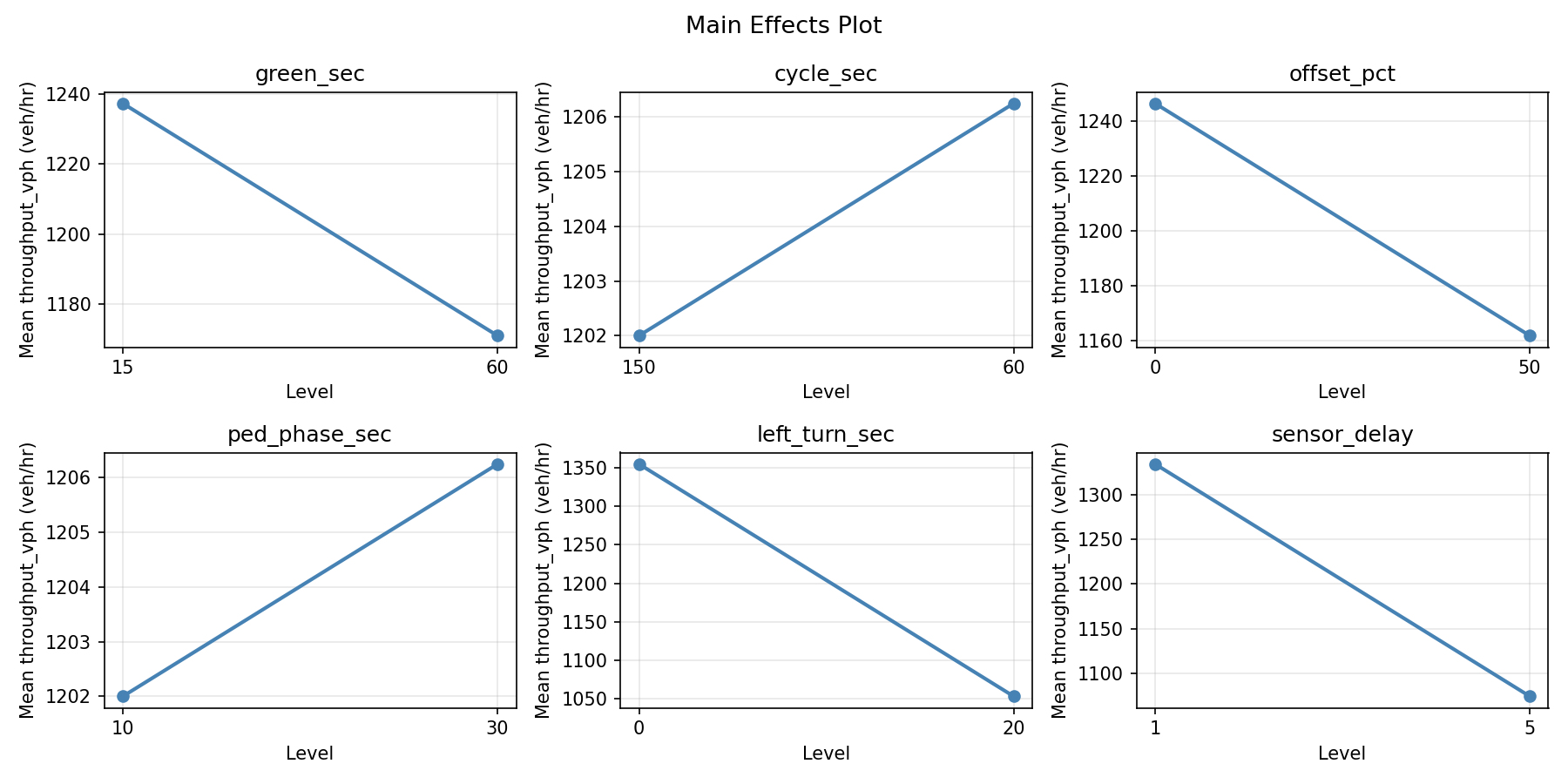
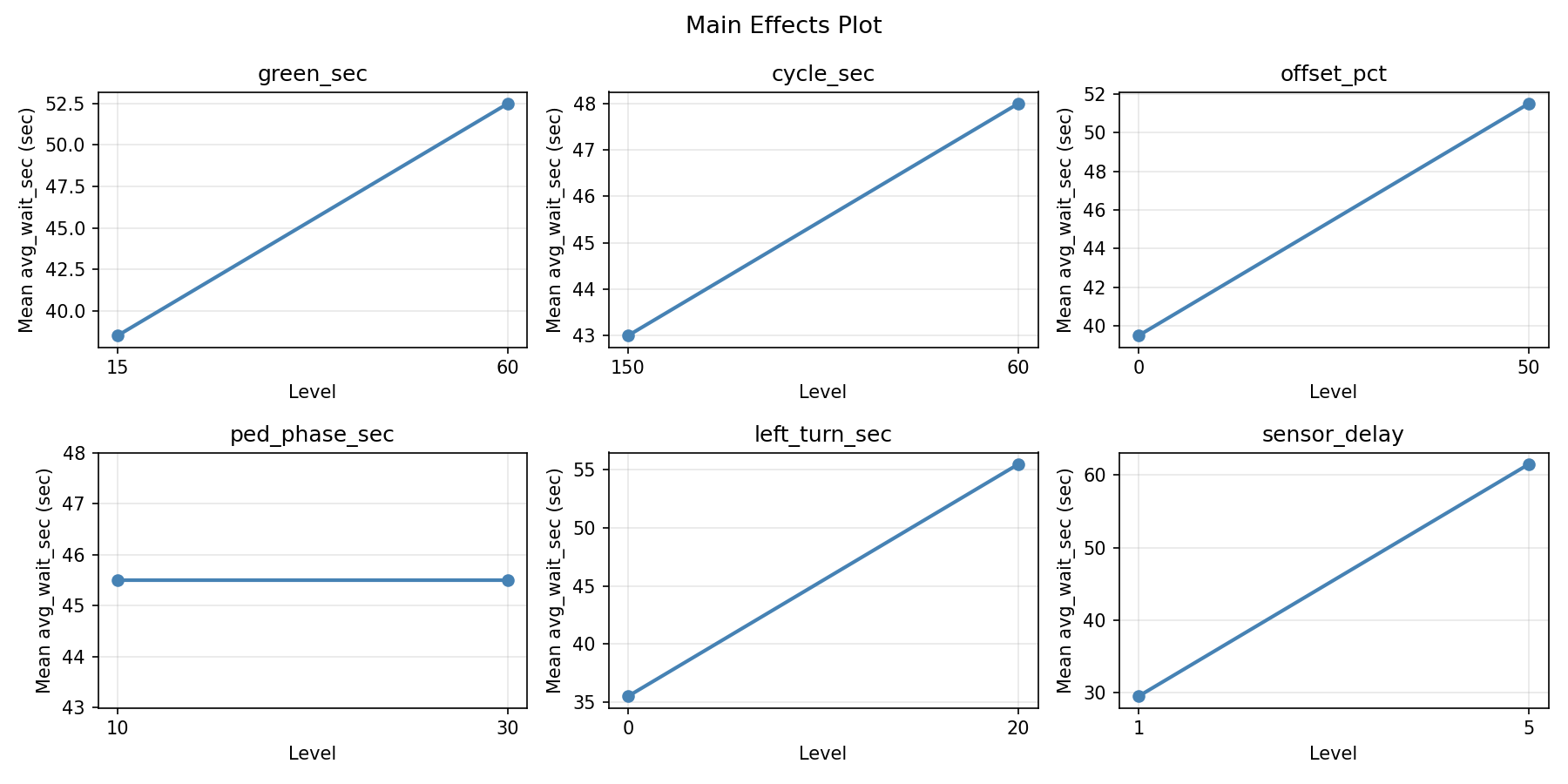
Main Effects Plot
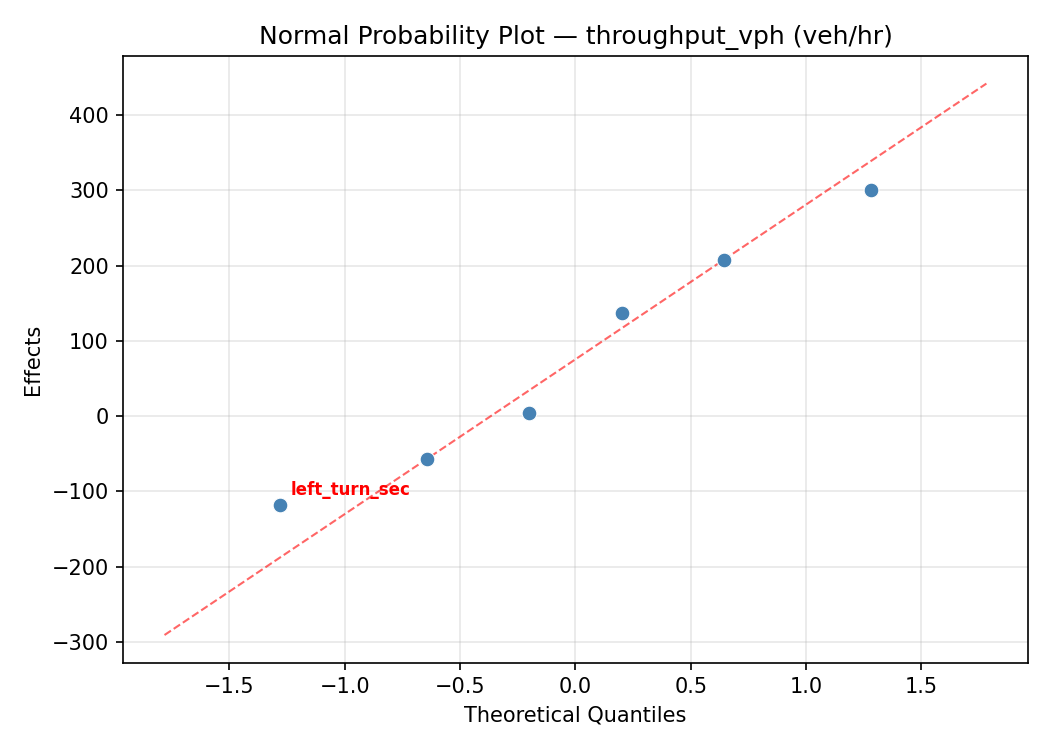
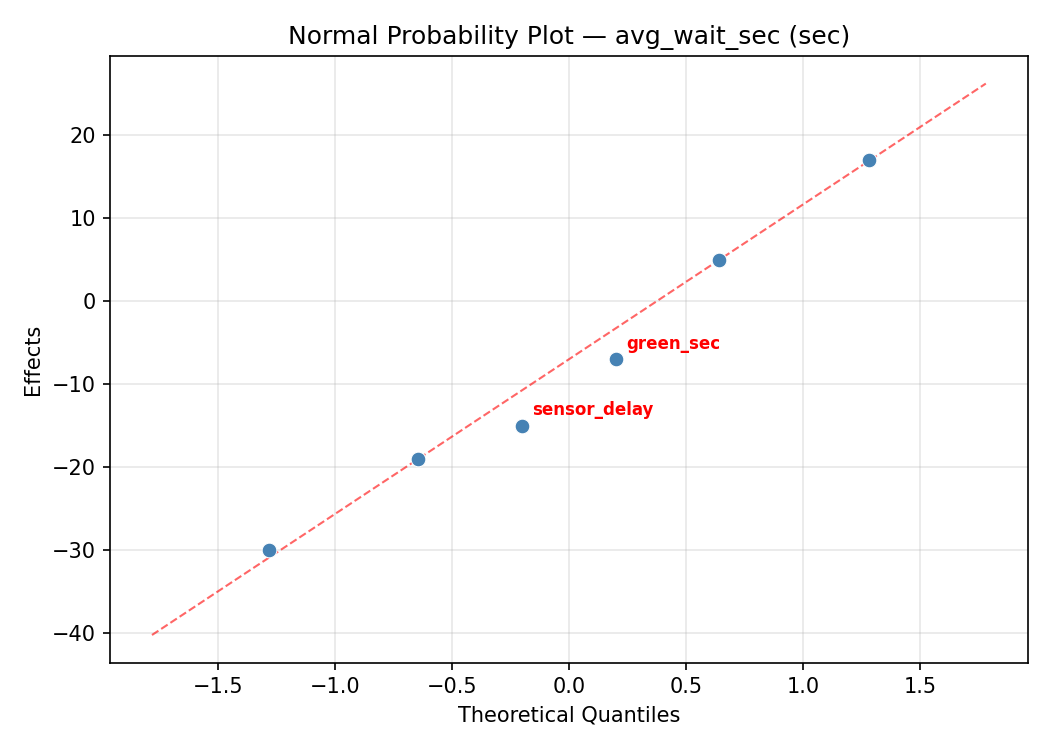
Normal Probability Plot of Effects
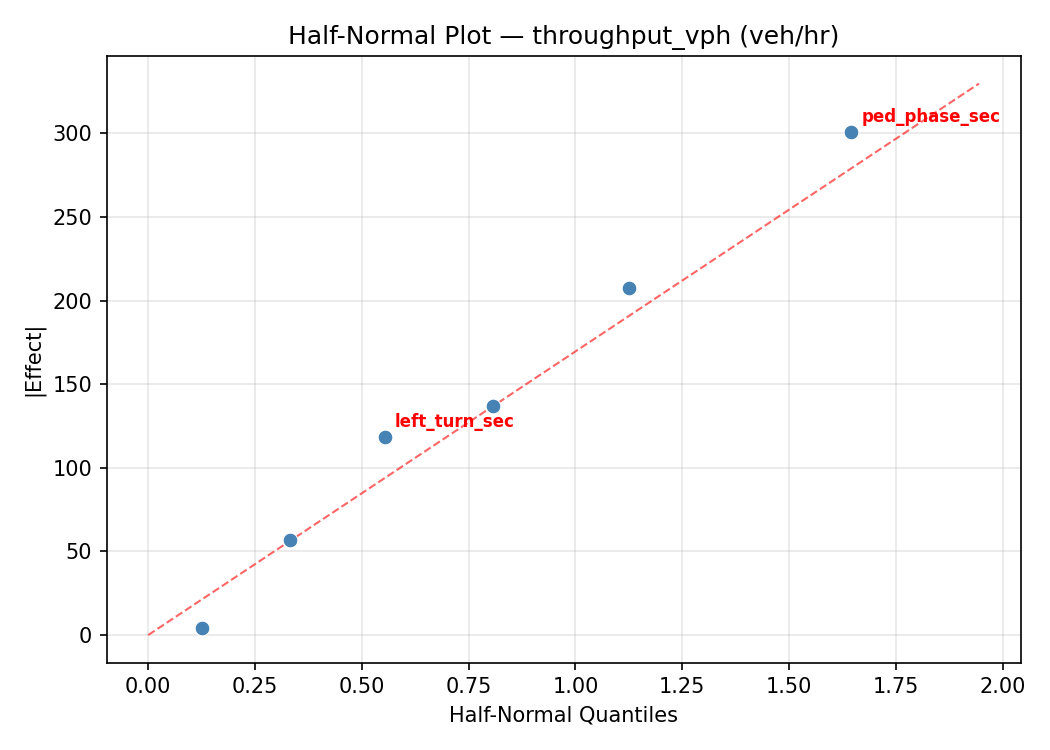
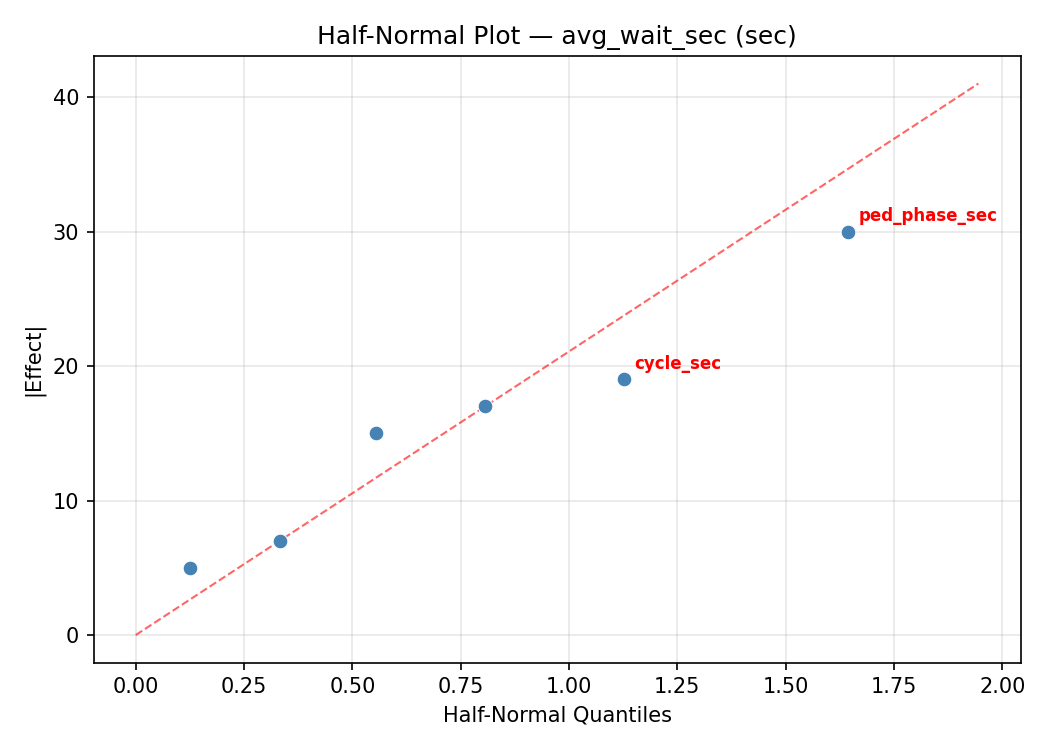
Half-Normal Plot of Effects
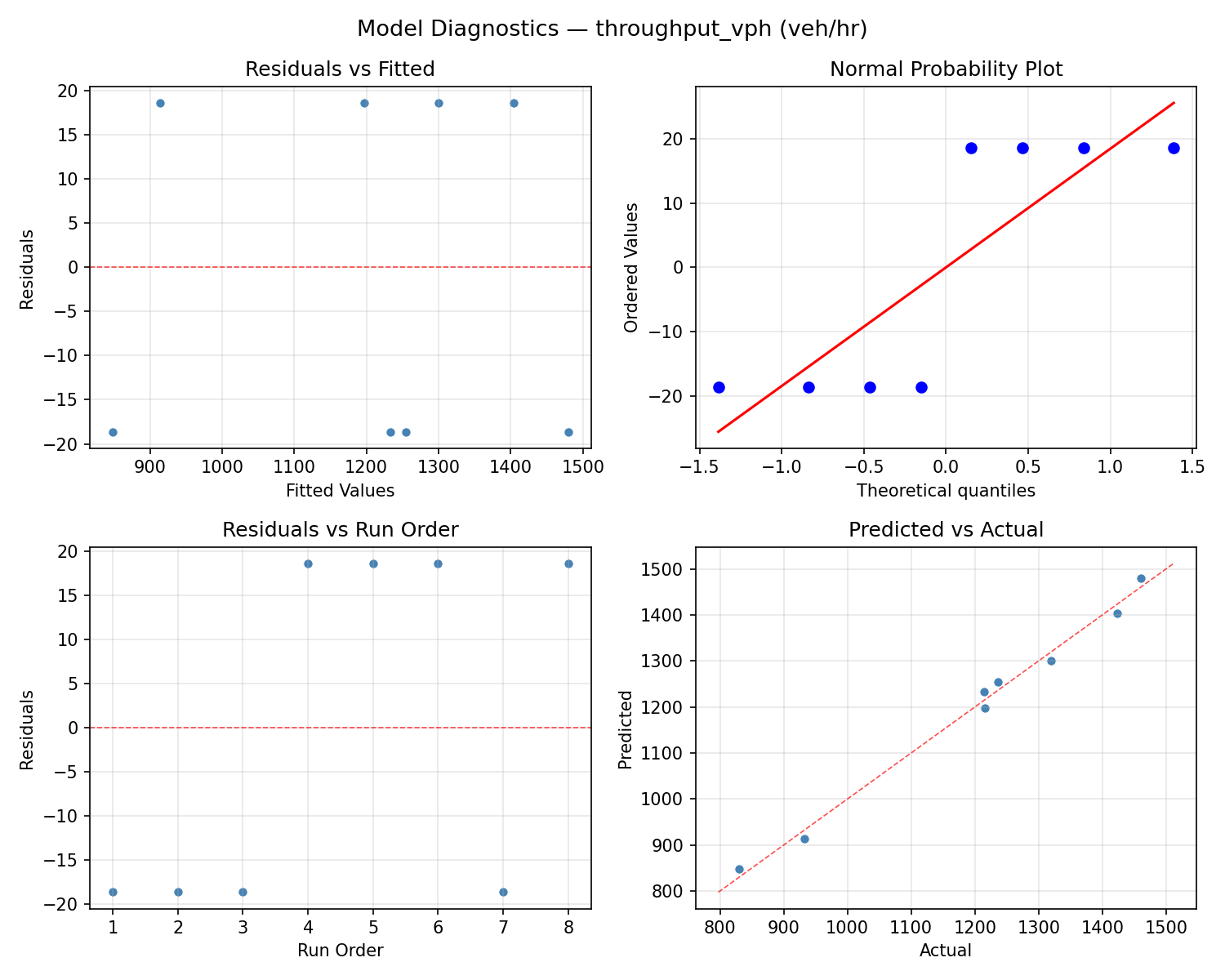
Model Diagnostics
Response: avg_wait_sec
Top factors: ped_phase_sec (33.5%), green_sec (20.7%), left_turn_sec (17.3%).
ANOVA
| Source | DF | SS | MS | F | p-value |
|---|
| Source | DF | SS | MS | F | p-value |
| green_sec | 1 | 684.5000 | 684.5000 | 1.542 | 0.2544 |
| cycle_sec | 1 | 392.0000 | 392.0000 | 0.883 | 0.3787 |
| offset_pct | 1 | 4.5000 | 4.5000 | 0.010 | 0.9226 |
| ped_phase_sec | 1 | 1800.0000 | 1800.0000 | 4.054 | 0.0839 |
| left_turn_sec | 1 | 480.5000 | 480.5000 | 1.082 | 0.3328 |
| sensor_delay | 1 | 200.0000 | 200.0000 | 0.450 | 0.5236 |
| green_sec*cycle_sec | 1 | 4.5000 | 4.5000 | 0.010 | 0.9226 |
| green_sec*offset_pct | 1 | 392.0000 | 392.0000 | 0.883 | 0.3787 |
| green_sec*ped_phase_sec | 1 | 480.5000 | 480.5000 | 1.082 | 0.3328 |
| green_sec*left_turn_sec | 1 | 1800.0000 | 1800.0000 | 4.054 | 0.0839 |
| green_sec*sensor_delay | 1 | 144.5000 | 144.5000 | 0.325 | 0.5862 |
| cycle_sec*offset_pct | 1 | 684.5000 | 684.5000 | 1.542 | 0.2544 |
| cycle_sec*ped_phase_sec | 1 | 200.0000 | 200.0000 | 0.450 | 0.5236 |
| cycle_sec*left_turn_sec | 1 | 144.5000 | 144.5000 | 0.325 | 0.5862 |
| cycle_sec*sensor_delay | 1 | 1800.0000 | 1800.0000 | 4.054 | 0.0839 |
| offset_pct*ped_phase_sec | 1 | 144.5000 | 144.5000 | 0.325 | 0.5862 |
| offset_pct*left_turn_sec | 1 | 200.0000 | 200.0000 | 0.450 | 0.5236 |
| offset_pct*sensor_delay | 1 | 480.5000 | 480.5000 | 1.082 | 0.3328 |
| ped_phase_sec*left_turn_sec | 1 | 684.5000 | 684.5000 | 1.542 | 0.2544 |
| ped_phase_sec*sensor_delay | 1 | 392.0000 | 392.0000 | 0.883 | 0.3787 |
| left_turn_sec*sensor_delay | 1 | 4.5000 | 4.5000 | 0.010 | 0.9226 |
| Error | (Lenth | PSE) | 7 | 3108.0000 | 444.0000 |
| Total | 7 | 3706.0000 | 529.4286 | | |
Pareto Chart
Main Effects Plot
Normal Probability Plot of Effects
Half-Normal Plot of Effects
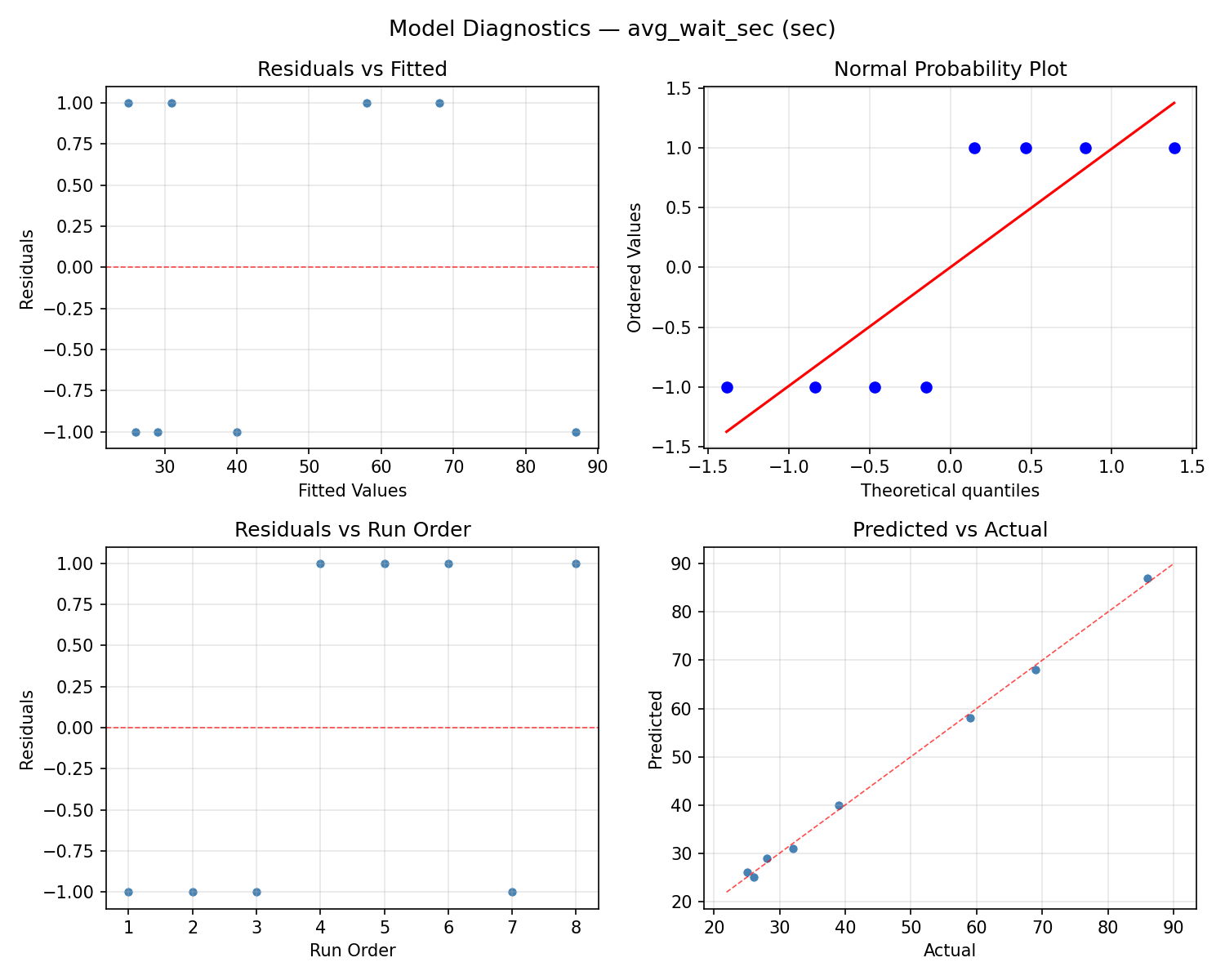
Model Diagnostics
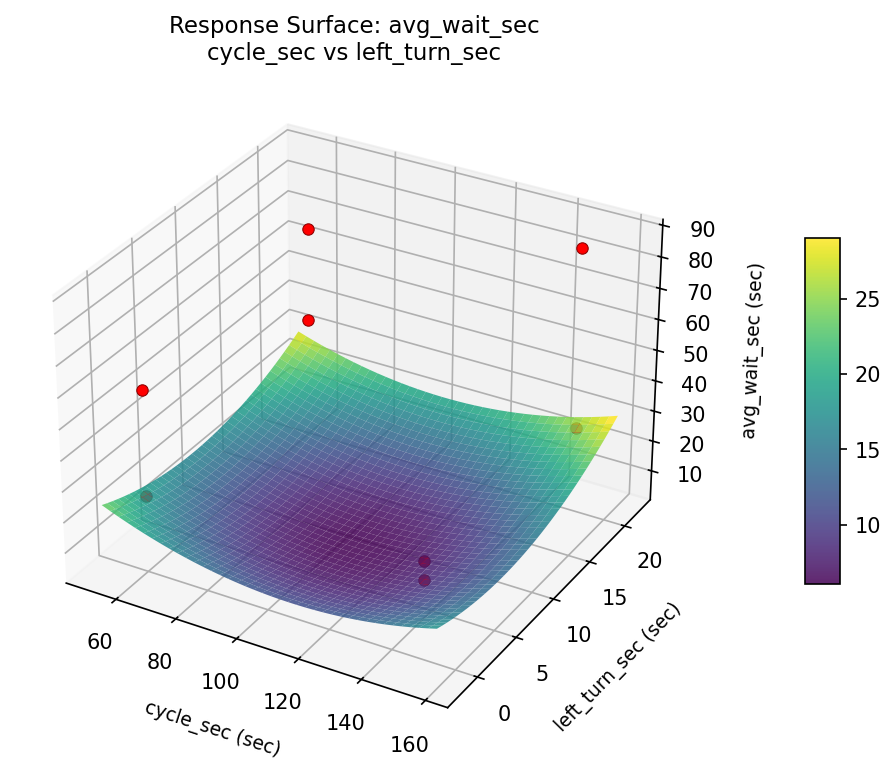
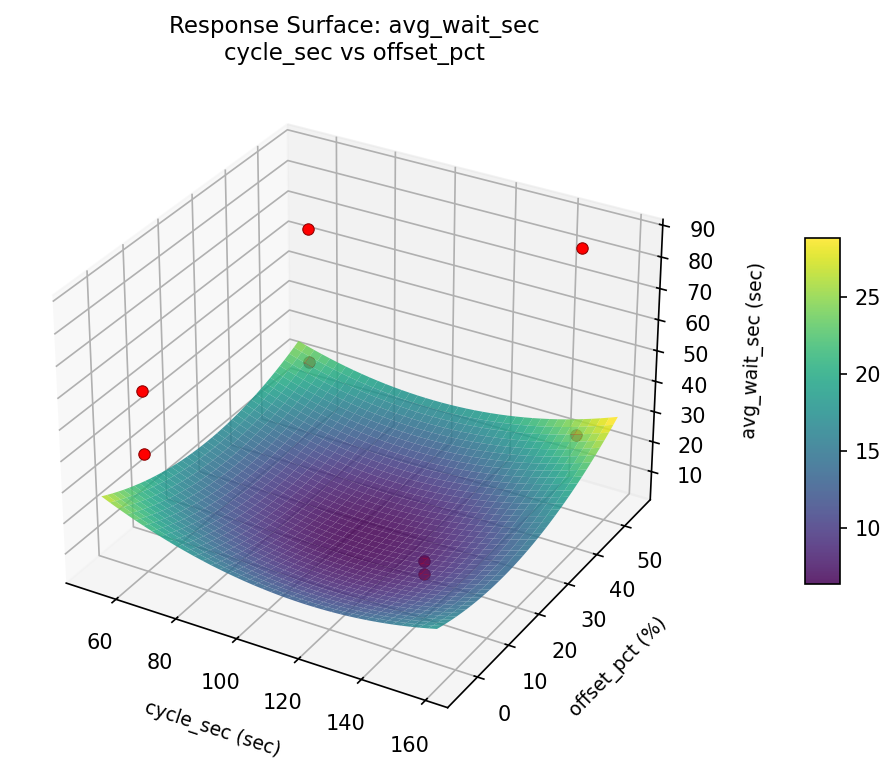
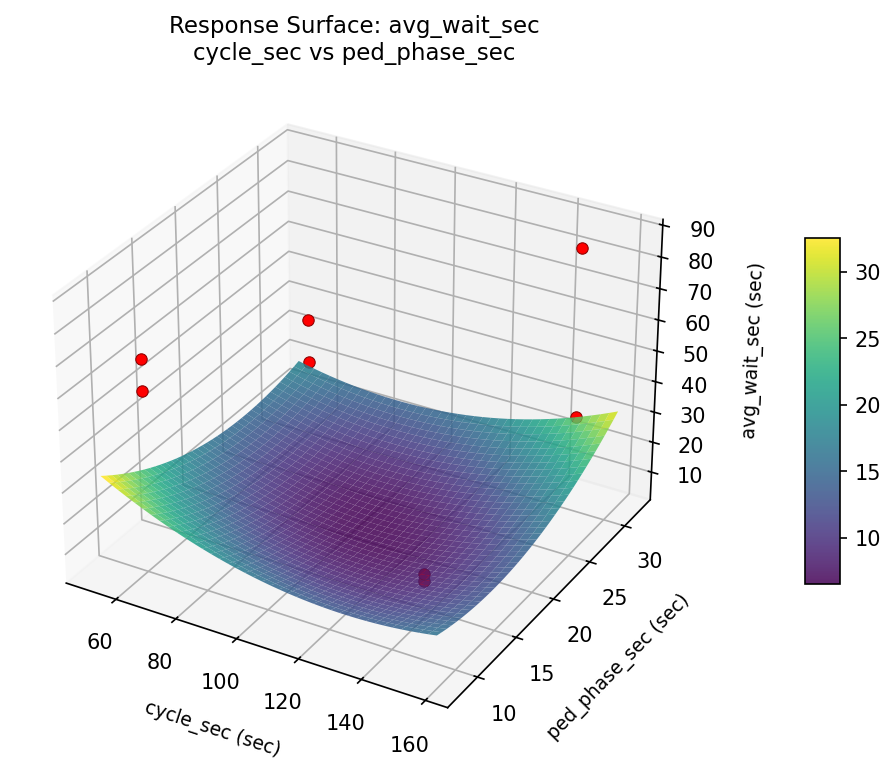
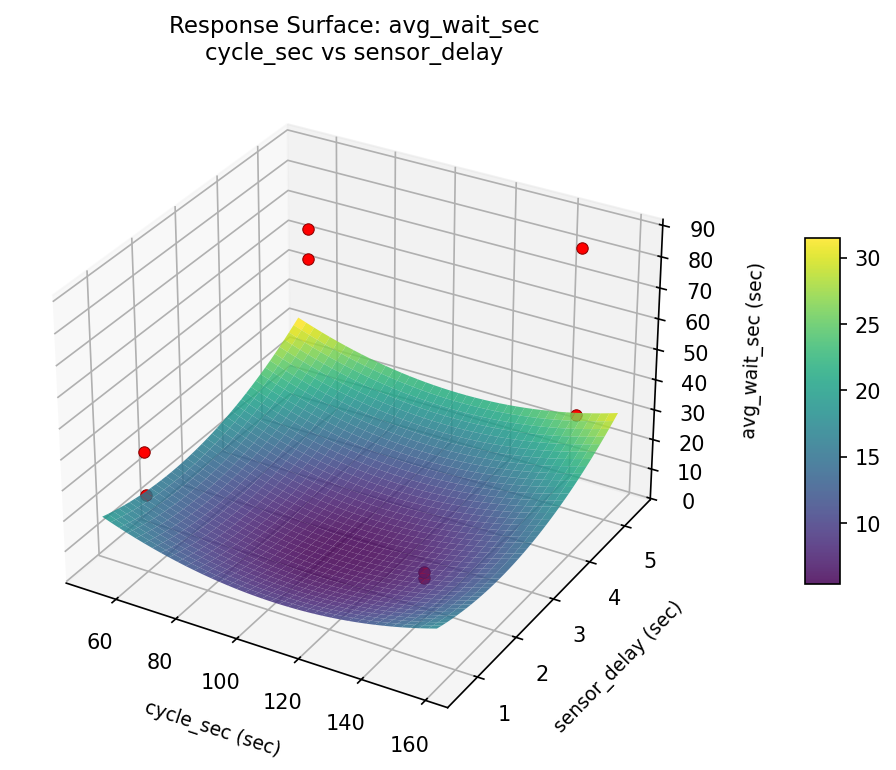
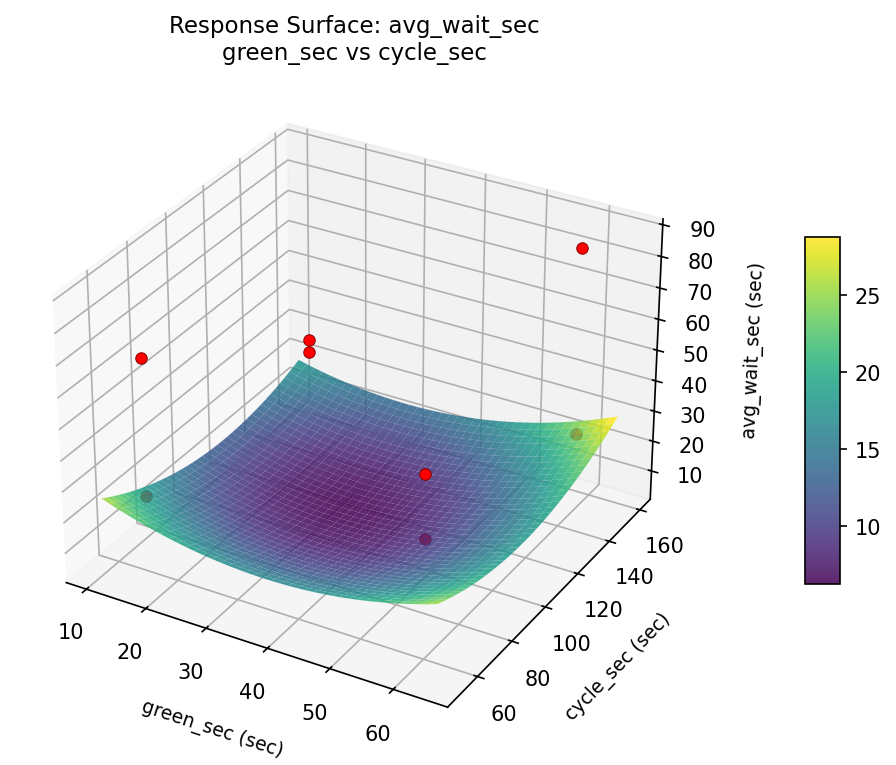
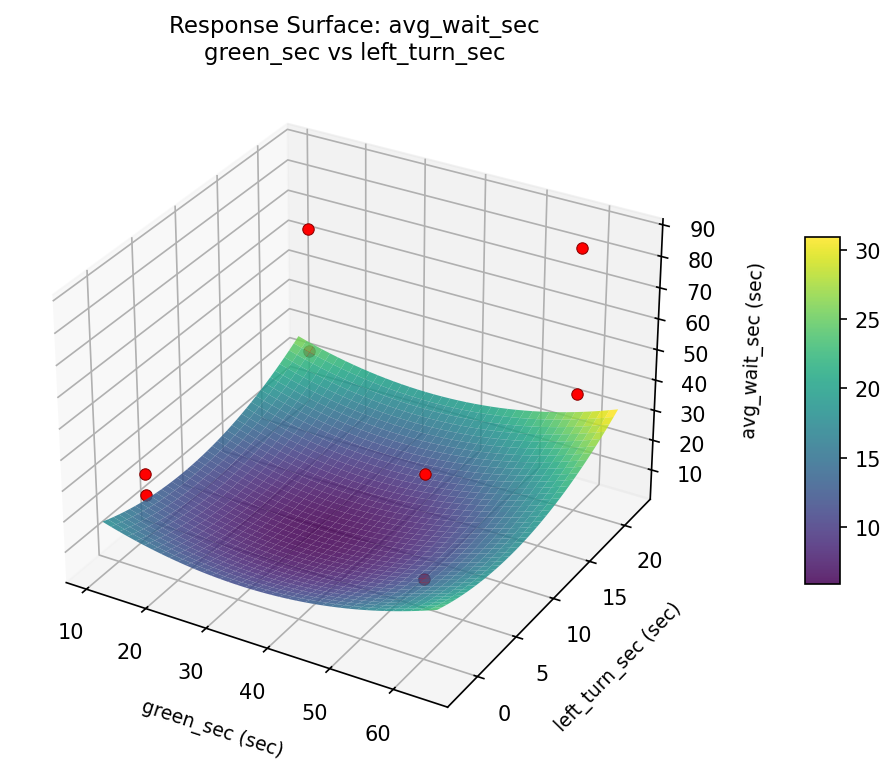
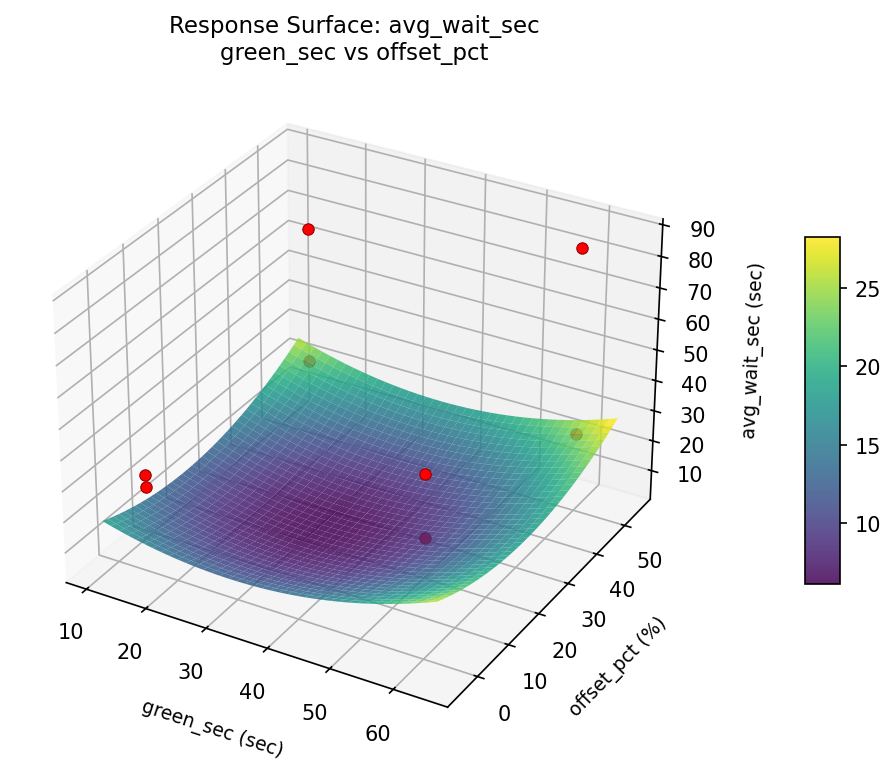
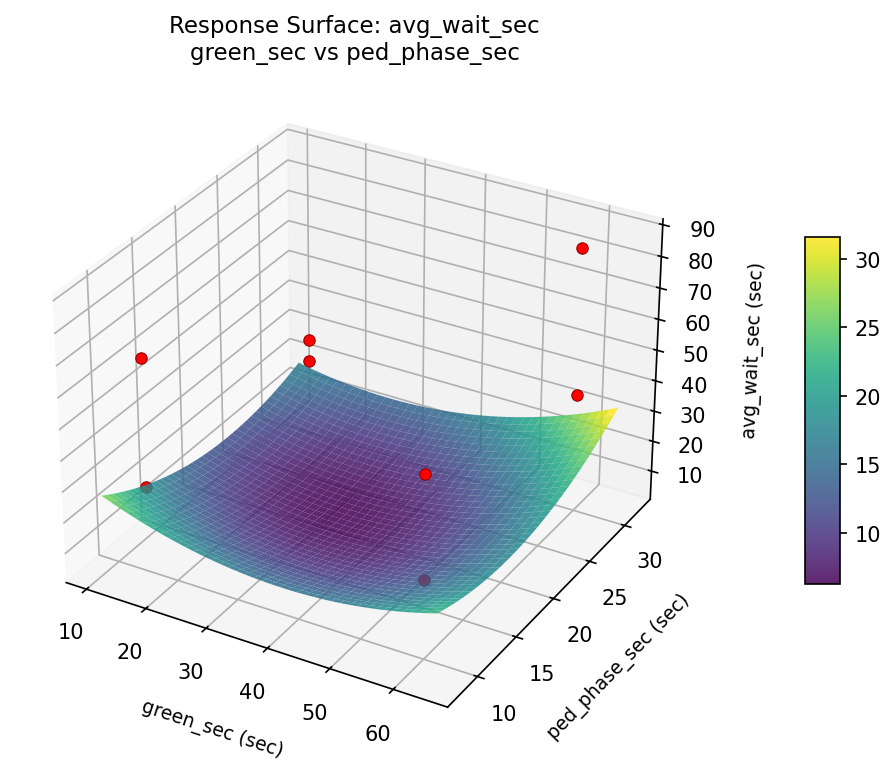
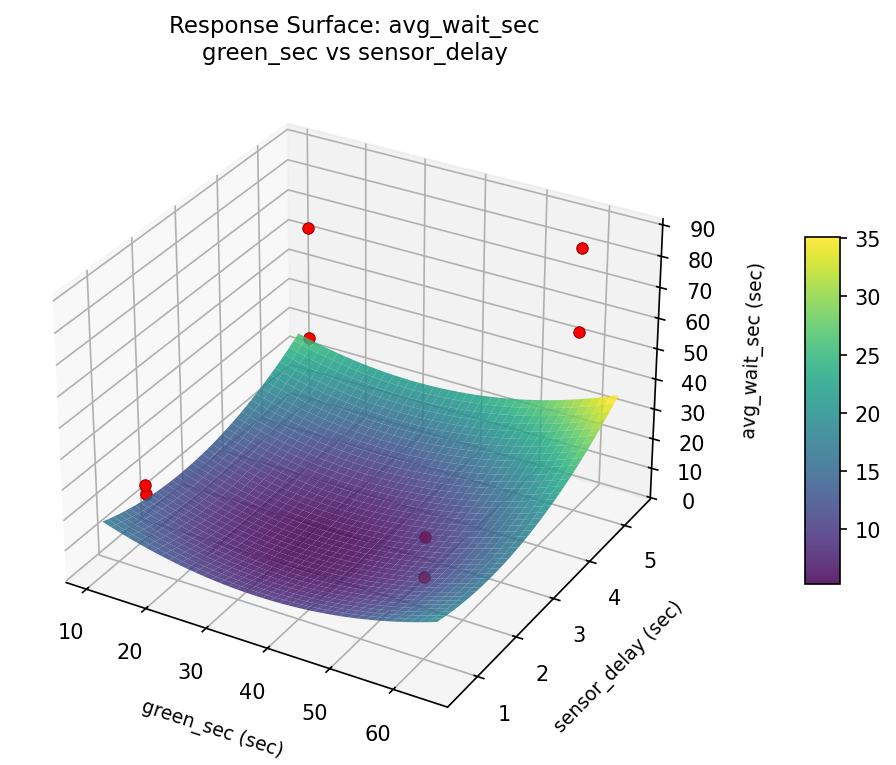
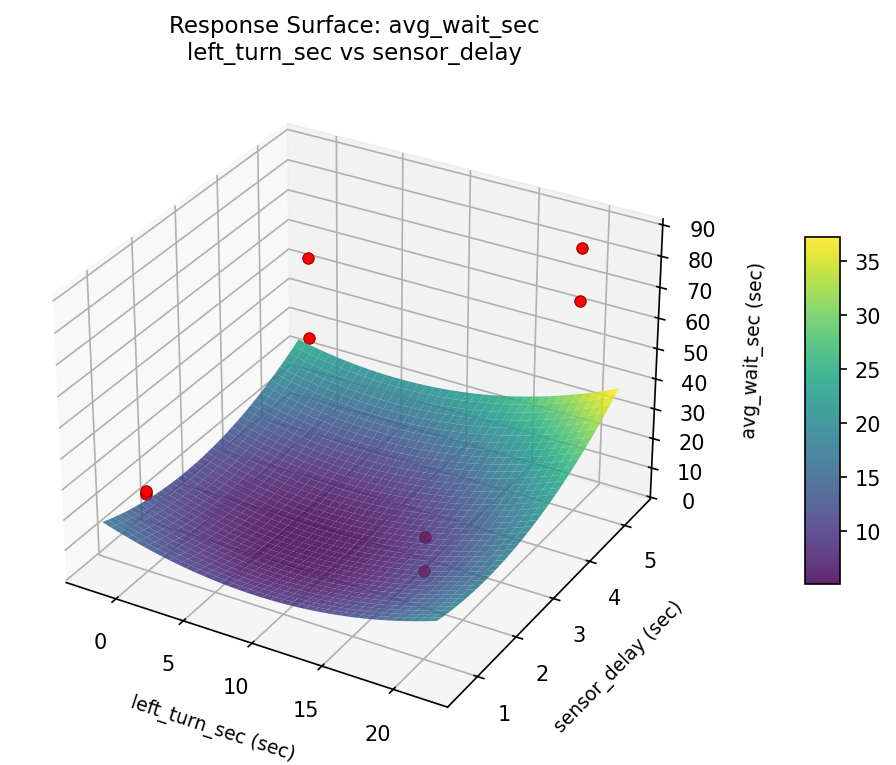
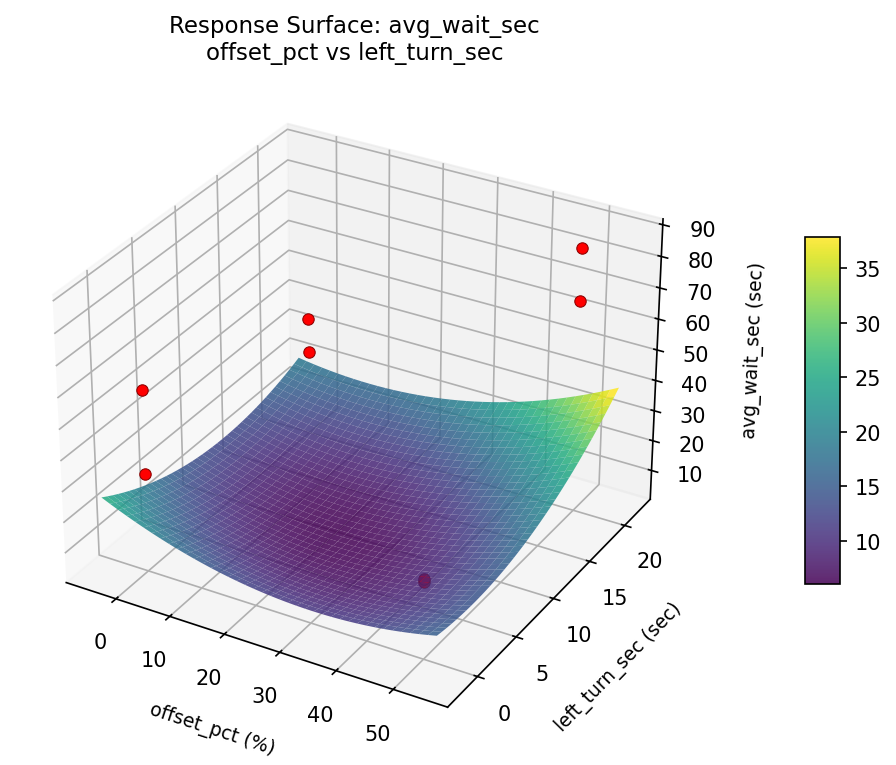
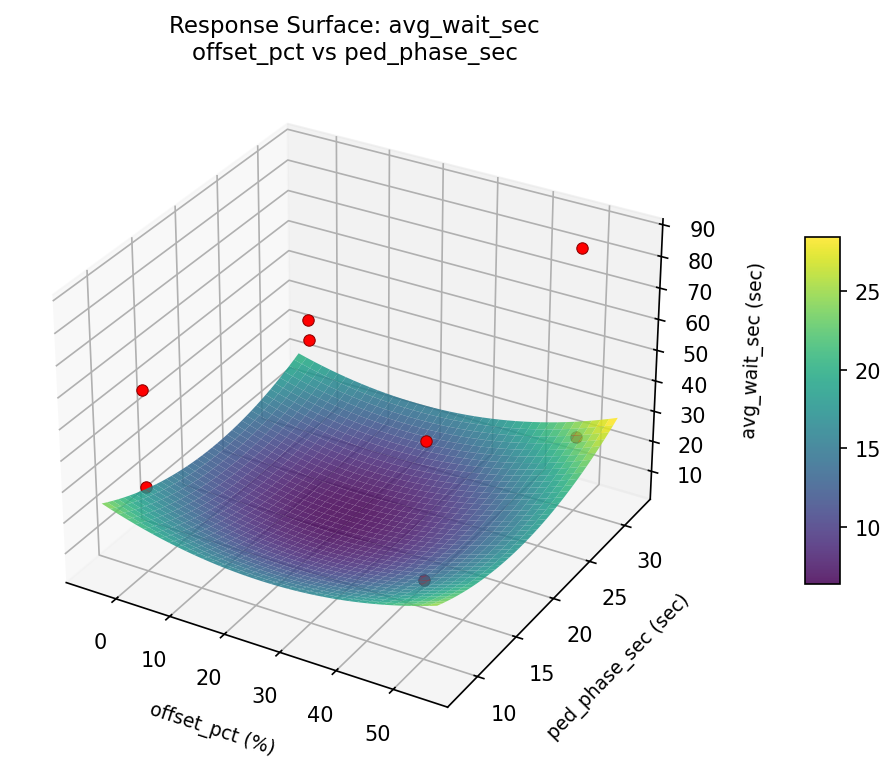
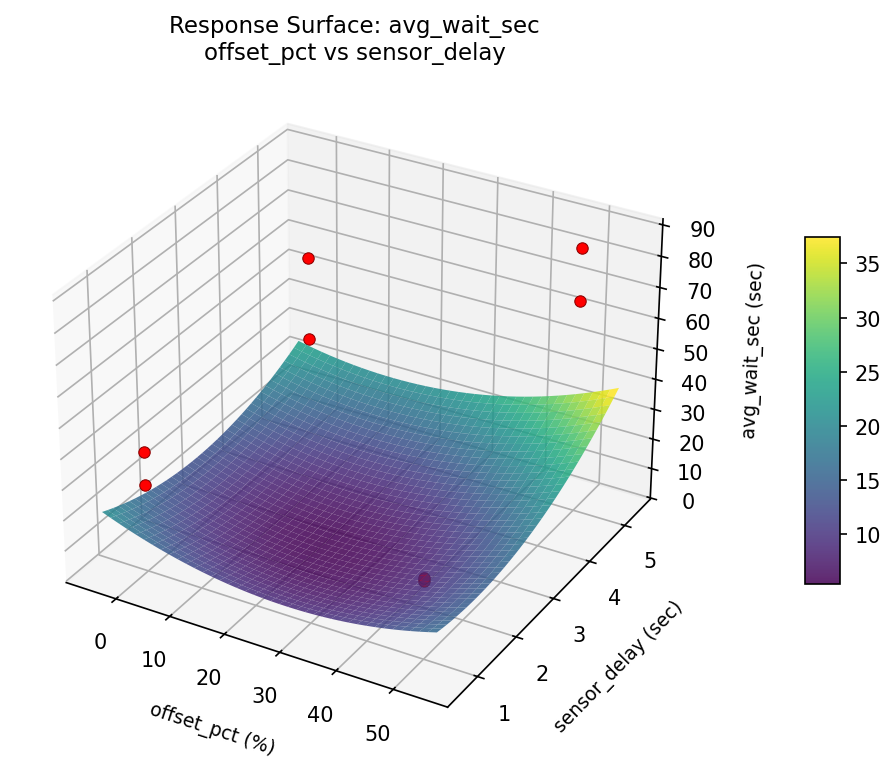
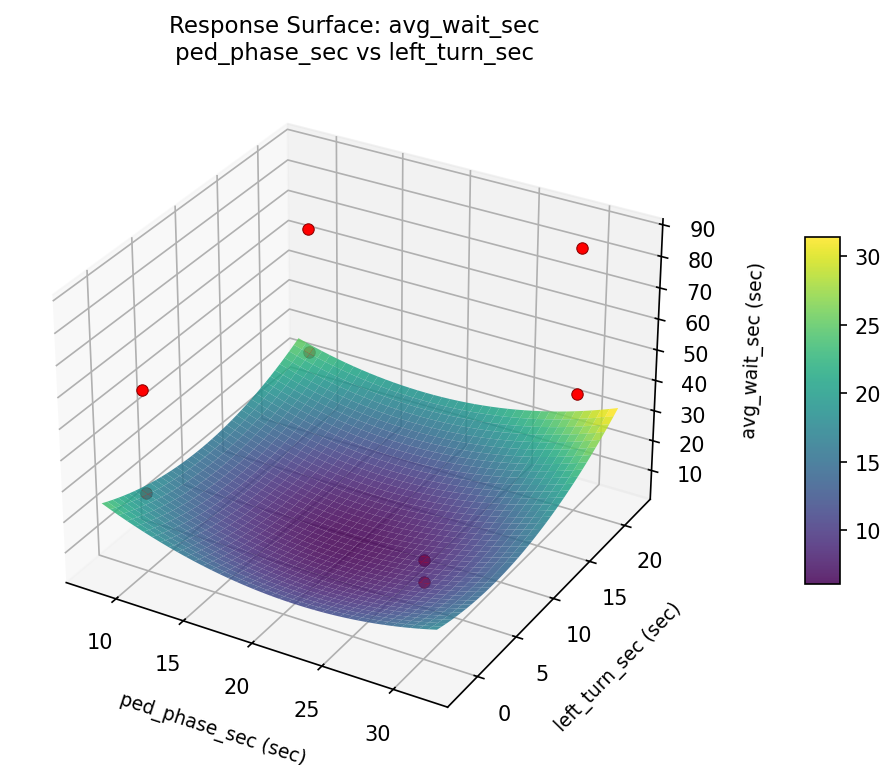
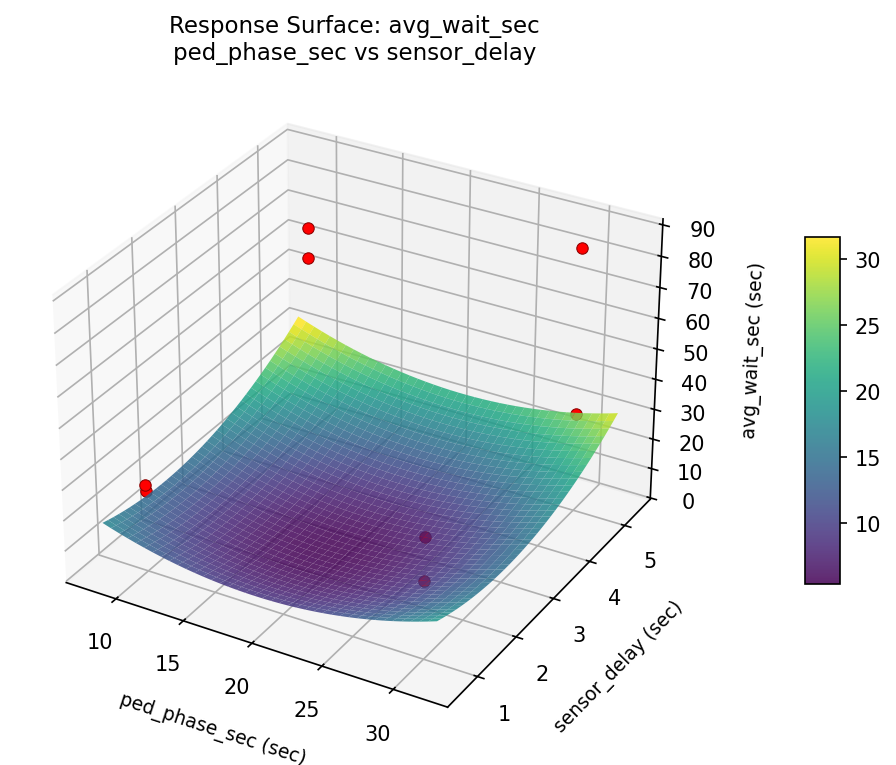
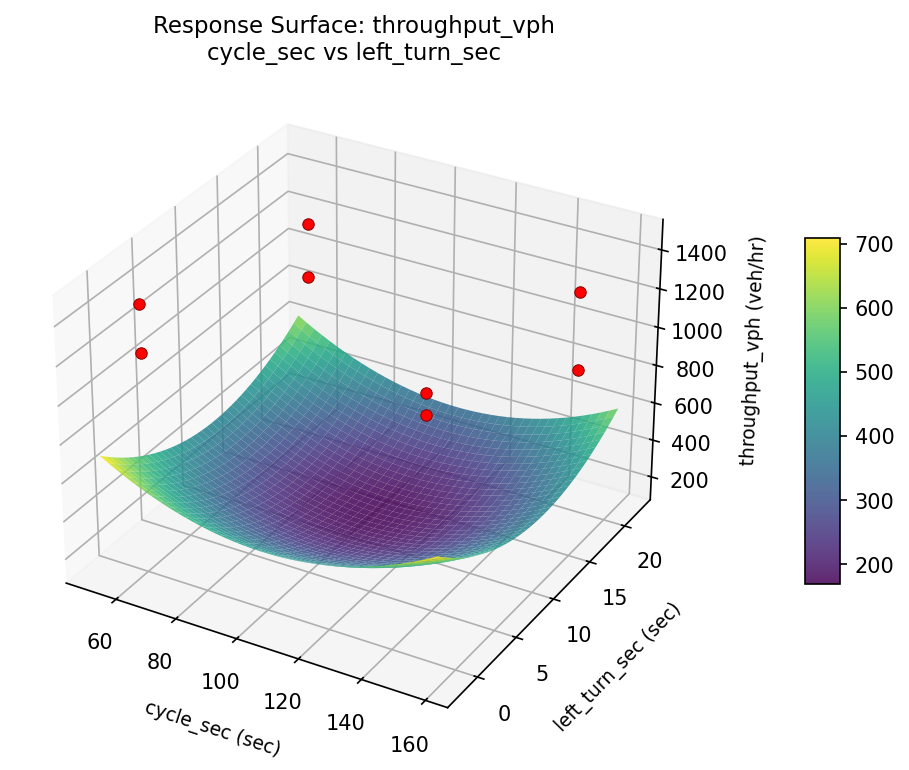
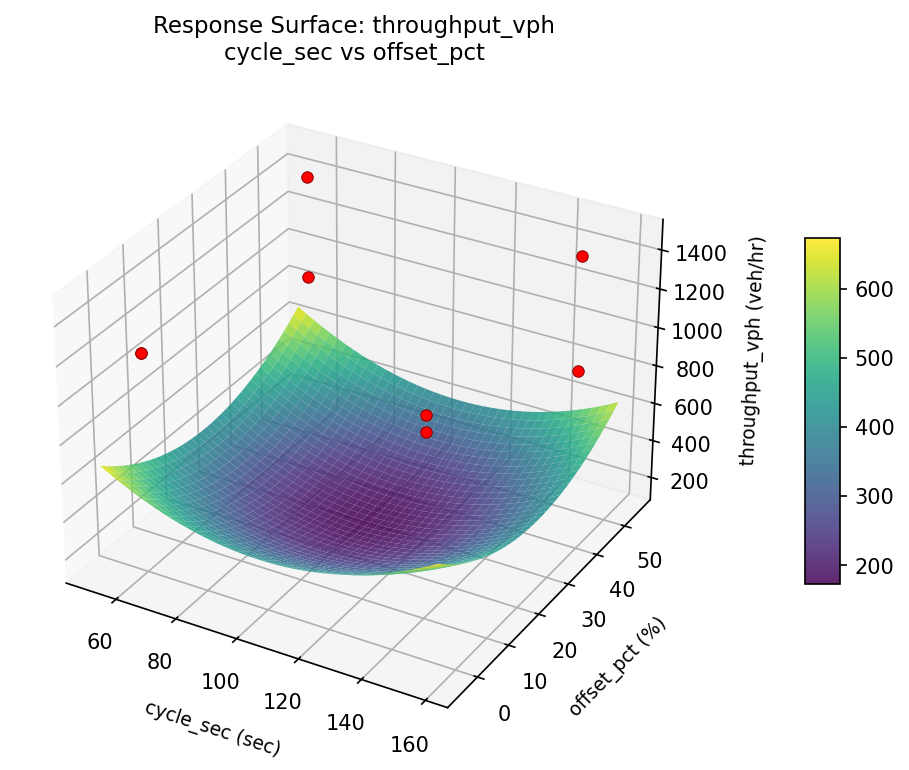
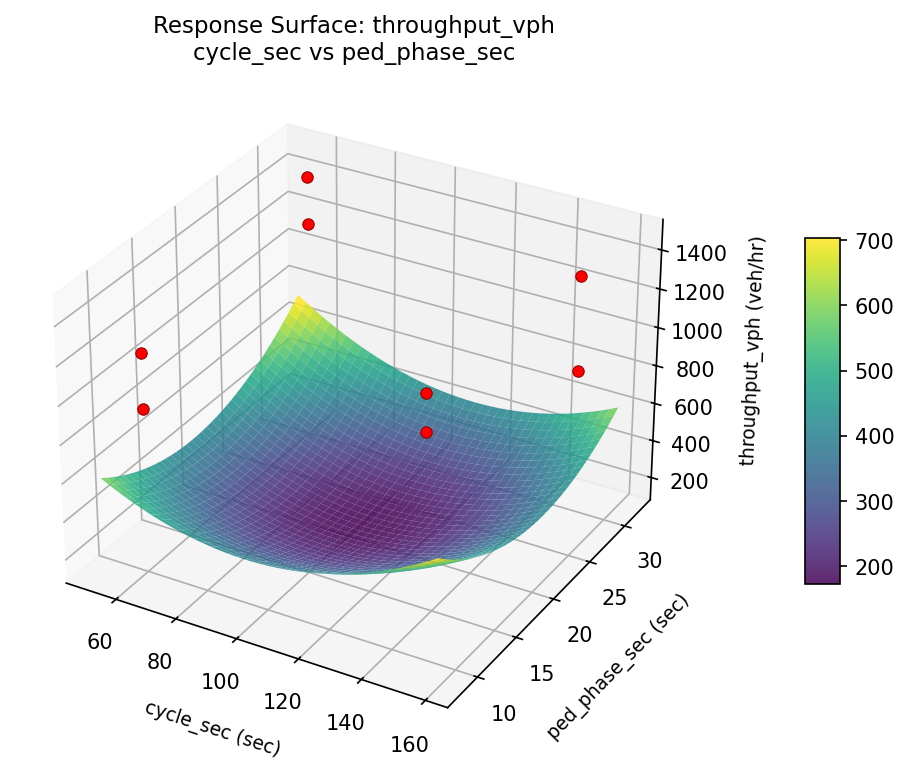
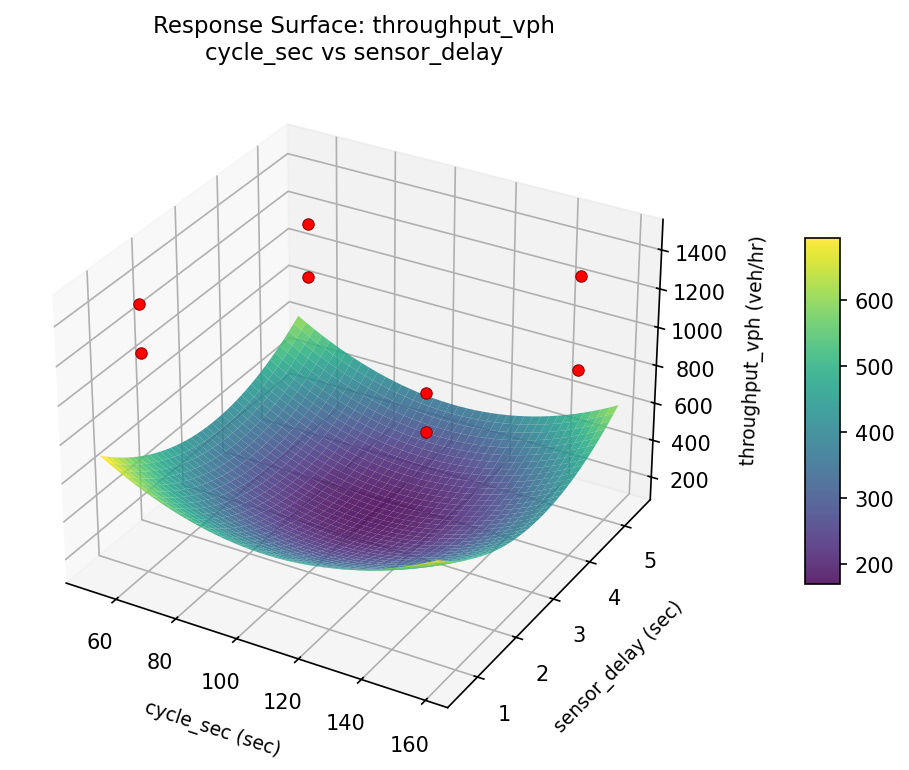
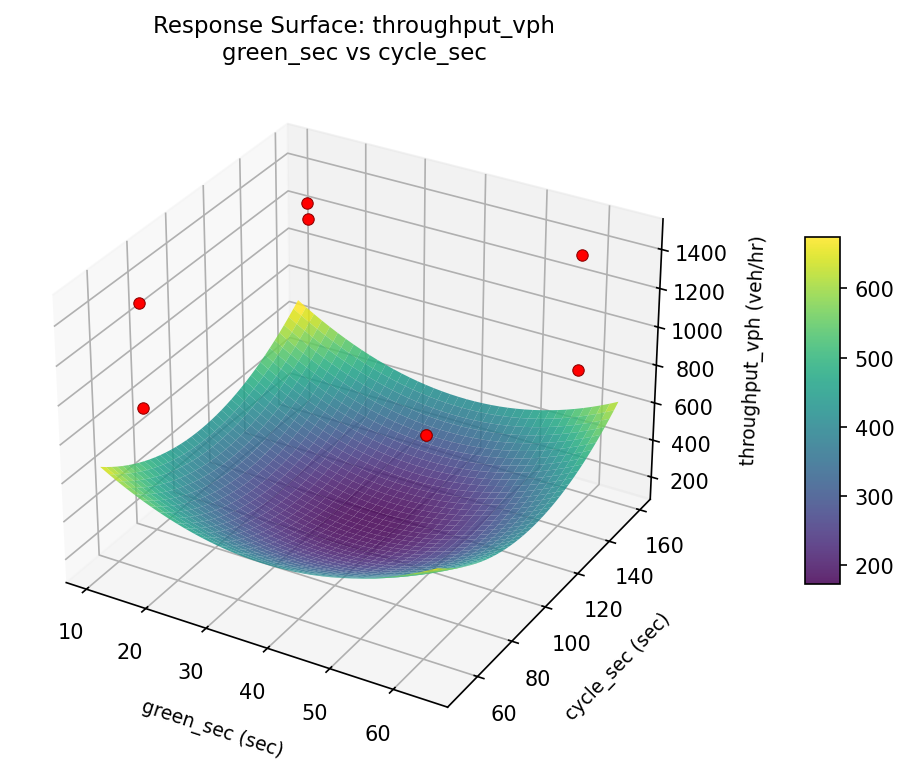
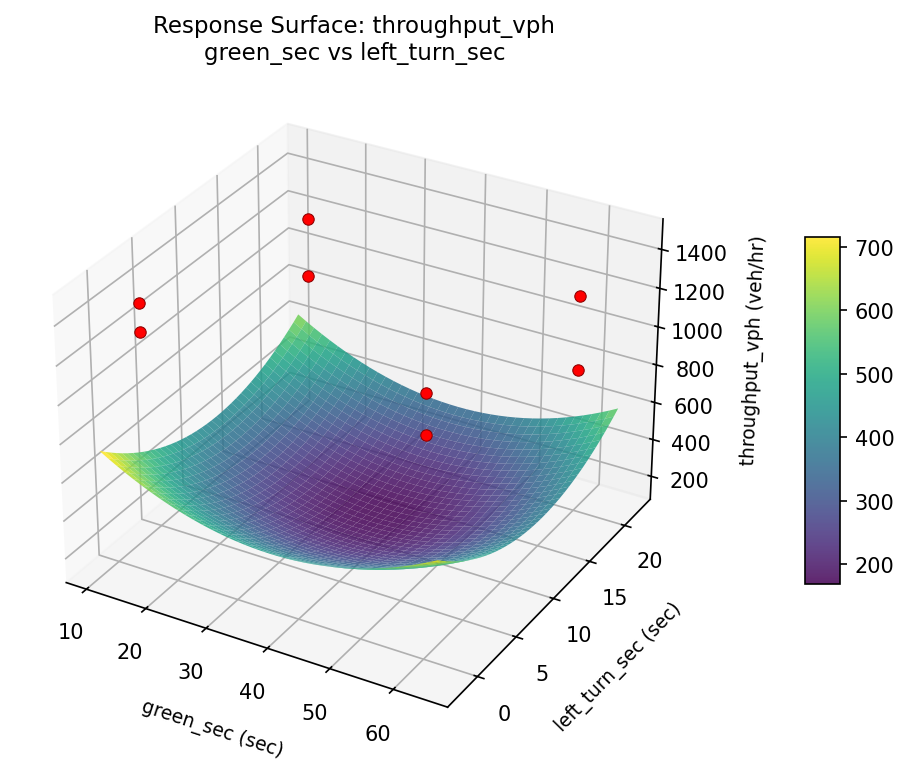
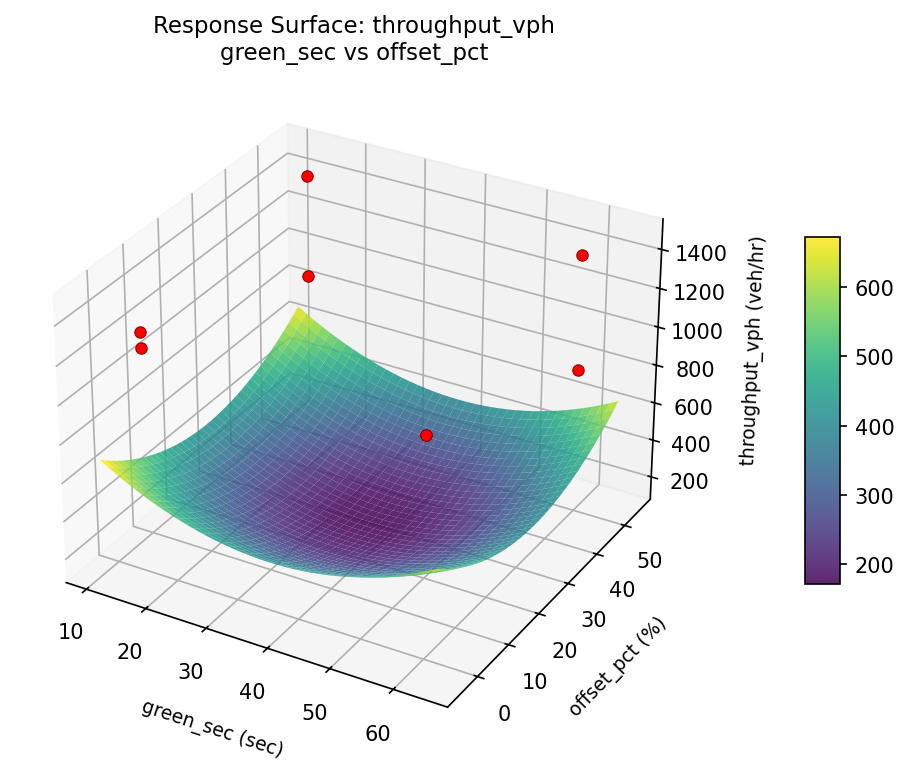
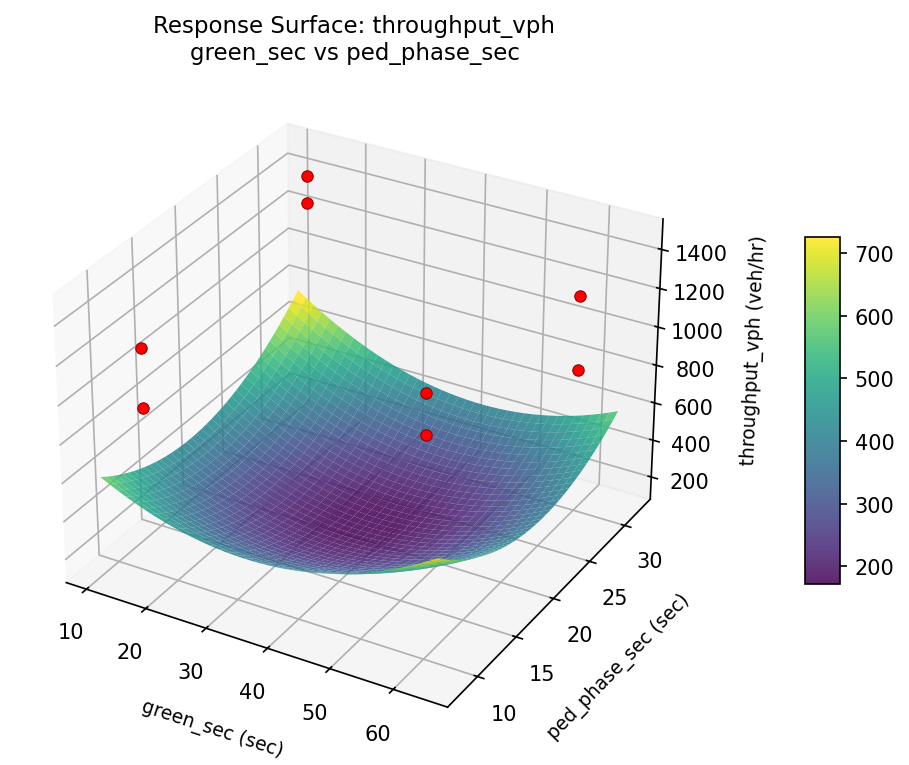
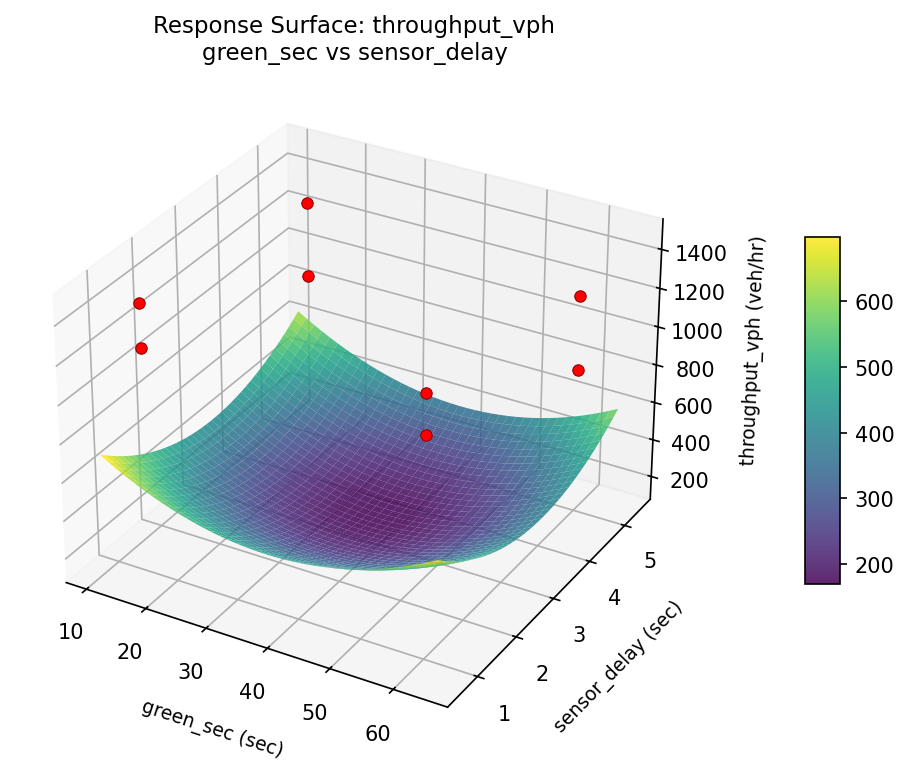
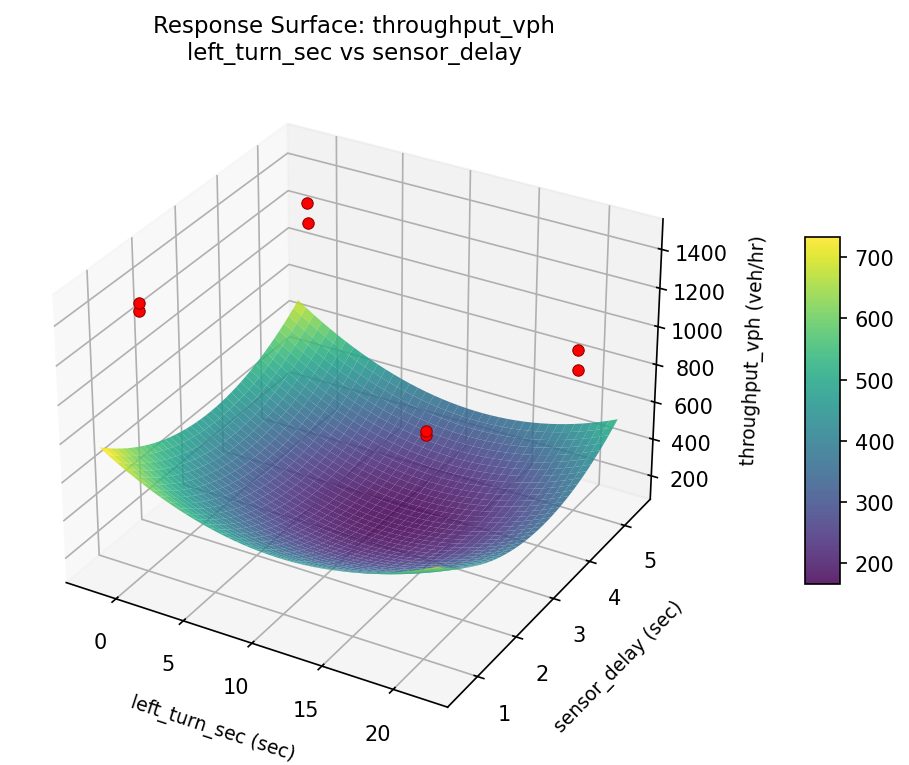
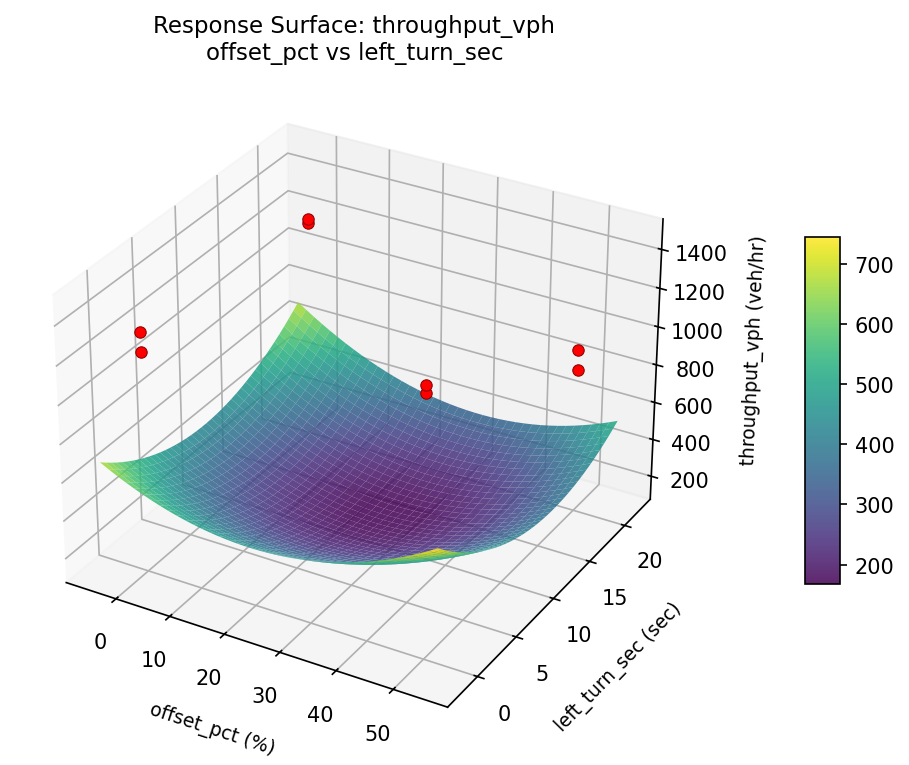
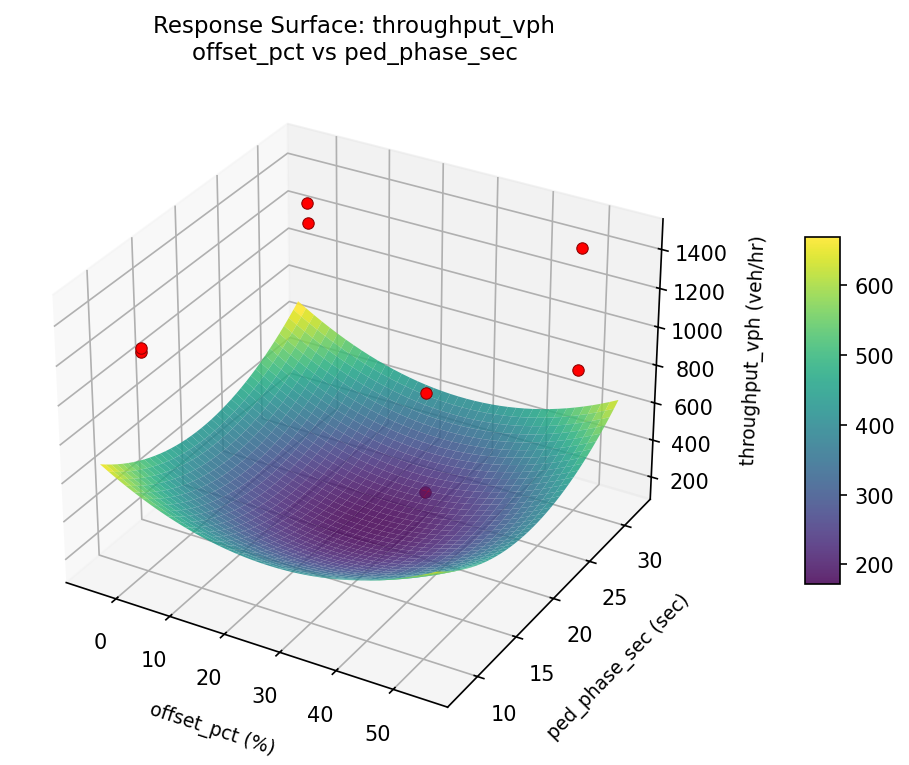
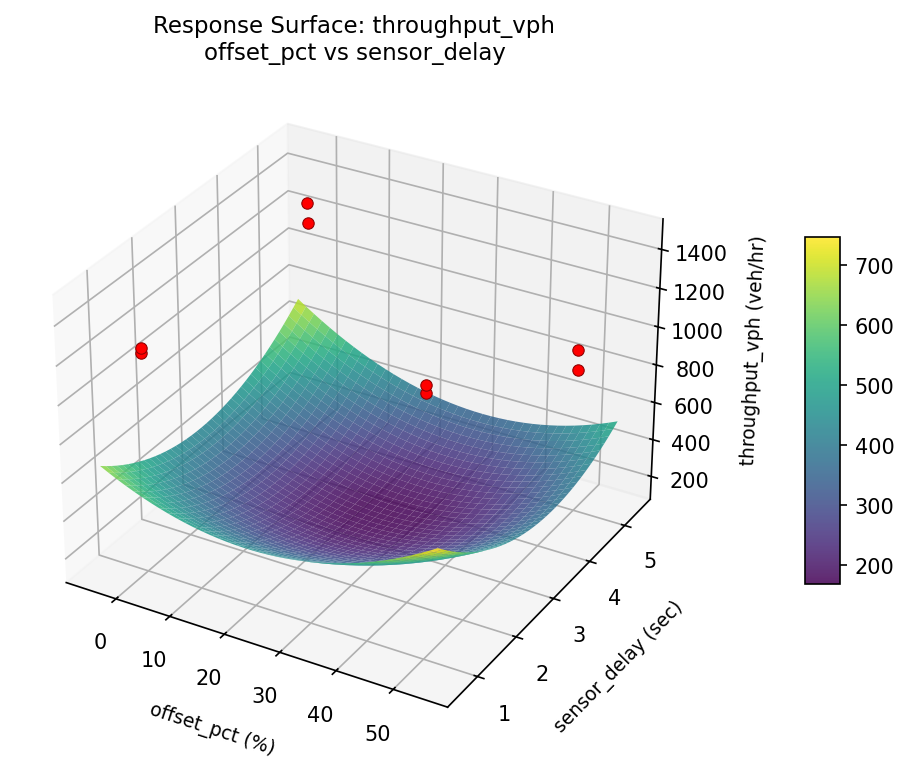
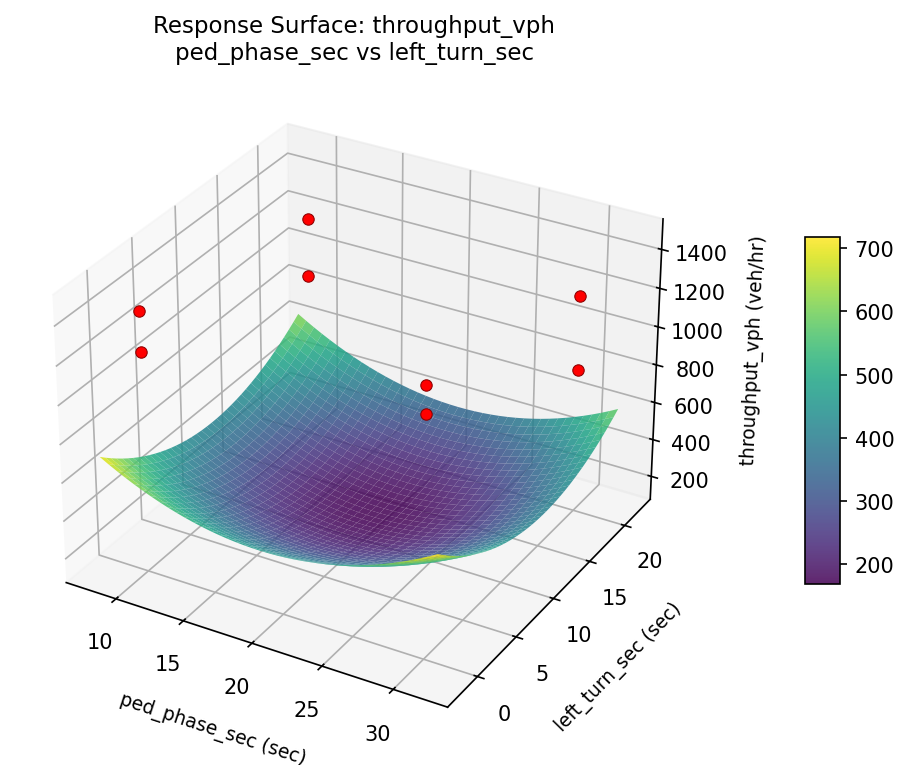
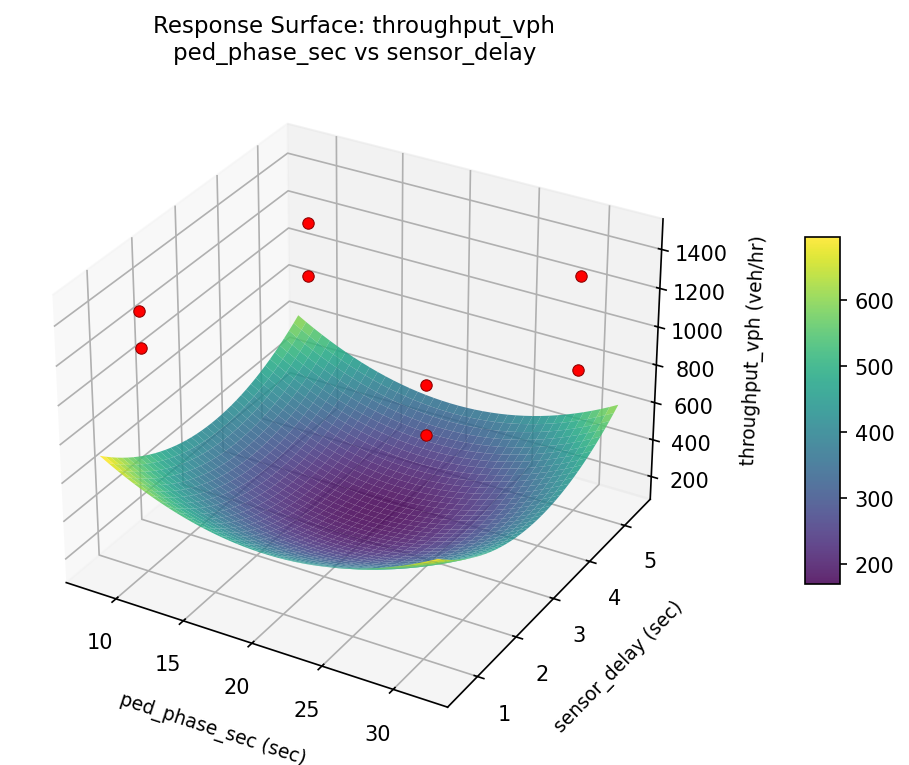
Response Surface Plots
3D surfaces fitted with quadratic RSM. Red dots are observed data points.
avg wait sec cycle sec vs left turn sec
avg wait sec cycle sec vs offset pct
avg wait sec cycle sec vs ped phase sec
avg wait sec cycle sec vs sensor delay
avg wait sec green sec vs cycle sec
avg wait sec green sec vs left turn sec
avg wait sec green sec vs offset pct
avg wait sec green sec vs ped phase sec
avg wait sec green sec vs sensor delay
avg wait sec left turn sec vs sensor delay
avg wait sec offset pct vs left turn sec
avg wait sec offset pct vs ped phase sec
avg wait sec offset pct vs sensor delay
avg wait sec ped phase sec vs left turn sec
avg wait sec ped phase sec vs sensor delay
throughput vph cycle sec vs left turn sec
throughput vph cycle sec vs offset pct
throughput vph cycle sec vs ped phase sec
throughput vph cycle sec vs sensor delay
throughput vph green sec vs cycle sec
throughput vph green sec vs left turn sec
throughput vph green sec vs offset pct
throughput vph green sec vs ped phase sec
throughput vph green sec vs sensor delay
throughput vph left turn sec vs sensor delay
throughput vph offset pct vs left turn sec
throughput vph offset pct vs ped phase sec
throughput vph offset pct vs sensor delay
throughput vph ped phase sec vs left turn sec
throughput vph ped phase sec vs sensor delay
Multi-Objective Optimization
When responses compete, Derringer–Suich desirability finds the best compromise.
Each response is scaled to a 0–1 desirability, then combined via a weighted geometric mean.
Overall Desirability
D = 1.0000
Per-Response Desirability
| Response | Weight | Desirability | Predicted | Dir |
|---|
throughput_vph |
1.5 |
|
1506.92 1.0000 1506.92 veh/hr |
↑ |
avg_wait_sec |
1.0 |
|
16.46 1.0000 16.46 sec |
↓ |
Recommended Settings
| Factor | Value |
|---|
green_sec | 41.2 sec |
cycle_sec | 62.39 sec |
offset_pct | 47.98 % |
ped_phase_sec | 11.14 sec |
left_turn_sec | 18.81 sec |
sensor_delay | 4.397 sec |
Source: from RSM model prediction
Trade-off Summary
Sacrifice = how much worse than single-objective best.
| Response | Predicted | Best Observed | Sacrifice |
|---|
avg_wait_sec | 16.46 | 25.00 | -8.54 |
Top 3 Runs by Desirability
| Run | D | Factor Settings |
|---|
| #8 | 0.9155 | green_sec=15, cycle_sec=60, offset_pct=50, ped_phase_sec=10, left_turn_sec=20, sensor_delay=5 |
| #6 | 0.7886 | green_sec=60, cycle_sec=60, offset_pct=0, ped_phase_sec=30, left_turn_sec=20, sensor_delay=1 |
Model Quality
| Response | R² | Type |
|---|
avg_wait_sec | 0.9405 | linear |
Full Multi-Objective Output
============================================================
MULTI-OBJECTIVE OPTIMIZATION
Method: Derringer-Suich Desirability Function
============================================================
Overall desirability: D = 1.0000
Response Weight Desirability Predicted Direction
---------------------------------------------------------------------
throughput_vph 1.5 1.0000 1506.92 veh/hr ↑
avg_wait_sec 1.0 1.0000 16.46 sec ↓
Recommended settings:
green_sec = 41.2 sec
cycle_sec = 62.39 sec
offset_pct = 47.98 %
ped_phase_sec = 11.14 sec
left_turn_sec = 18.81 sec
sensor_delay = 4.397 sec
(from RSM model prediction)
Trade-off summary:
throughput_vph: 1506.92 (best observed: 1461.00, sacrifice: -45.92)
avg_wait_sec: 16.46 (best observed: 25.00, sacrifice: -8.54)
Model quality:
throughput_vph: R² = 0.9988 (linear)
avg_wait_sec: R² = 0.9405 (linear)
Top 3 observed runs by overall desirability:
1. Run #1 (D=0.9545): green_sec=60, cycle_sec=60, offset_pct=0, ped_phase_sec=10, left_turn_sec=0, sensor_delay=5
2. Run #8 (D=0.9155): green_sec=15, cycle_sec=60, offset_pct=50, ped_phase_sec=10, left_turn_sec=20, sensor_delay=5
3. Run #6 (D=0.7886): green_sec=60, cycle_sec=60, offset_pct=0, ped_phase_sec=30, left_turn_sec=20, sensor_delay=1
Full Analysis Output
=== Main Effects: throughput_vph ===
Factor Effect Std Error % Contribution
--------------------------------------------------------------
ped_phase_sec -300.7500 78.1300 36.5%
green_sec 188.7500 78.1300 22.9%
left_turn_sec 155.7500 78.1300 18.9%
offset_pct -108.2500 78.1300 13.1%
cycle_sec -66.2500 78.1300 8.0%
sensor_delay -4.7500 78.1300 0.6%
=== ANOVA Table: throughput_vph ===
Source DF SS MS F p-value
-----------------------------------------------------------------------------
green_sec 1 71253.1250 71253.1250 2.937 0.1303
cycle_sec 1 8778.1250 8778.1250 0.362 0.5665
offset_pct 1 23436.1250 23436.1250 0.966 0.3584
ped_phase_sec 1 180901.1250 180901.1250 7.457 0.0293
left_turn_sec 1 48516.1250 48516.1250 2.000 0.2002
sensor_delay 1 45.1250 45.1250 0.002 0.9668
green_sec*cycle_sec 1 23436.1250 23436.1250 0.966 0.3584
green_sec*offset_pct 1 8778.1250 8778.1250 0.362 0.5665
green_sec*ped_phase_sec 1 48516.1250 48516.1250 2.000 0.2002
green_sec*left_turn_sec 1 180901.1250 180901.1250 7.457 0.0293
green_sec*sensor_delay 1 8911.1250 8911.1250 0.367 0.5636
cycle_sec*offset_pct 1 71253.1250 71253.1250 2.937 0.1303
cycle_sec*ped_phase_sec 1 45.1250 45.1250 0.002 0.9668
cycle_sec*left_turn_sec 1 8911.1250 8911.1250 0.367 0.5636
cycle_sec*sensor_delay 1 180901.1250 180901.1250 7.457 0.0293
offset_pct*ped_phase_sec 1 8911.1250 8911.1250 0.367 0.5636
offset_pct*left_turn_sec 1 45.1250 45.1250 0.002 0.9668
offset_pct*sensor_delay 1 48516.1250 48516.1250 2.000 0.2002
ped_phase_sec*left_turn_sec 1 71253.1250 71253.1250 2.937 0.1303
ped_phase_sec*sensor_delay 1 8778.1250 8778.1250 0.362 0.5665
left_turn_sec*sensor_delay 1 23436.1250 23436.1250 0.966 0.3584
Error (Lenth PSE) 7 169823.0625 24260.4375
Total 7 341840.8750 48834.4107
Note: Error estimated using Lenth's pseudo-standard-error (unreplicated design)
=== Interaction Effects: throughput_vph ===
Factor A Factor B Interaction % Contribution
------------------------------------------------------------------------
green_sec left_turn_sec -300.7500 16.3%
cycle_sec sensor_delay 300.7500 16.3%
cycle_sec offset_pct -188.7500 10.2%
ped_phase_sec left_turn_sec 188.7500 10.2%
green_sec ped_phase_sec 155.7500 8.4%
offset_pct sensor_delay 155.7500 8.4%
green_sec cycle_sec 108.2500 5.9%
left_turn_sec sensor_delay -108.2500 5.9%
green_sec sensor_delay 66.7500 3.6%
cycle_sec left_turn_sec -66.7500 3.6%
offset_pct ped_phase_sec 66.7500 3.6%
green_sec offset_pct 66.2500 3.6%
ped_phase_sec sensor_delay 66.2500 3.6%
cycle_sec ped_phase_sec 4.7500 0.3%
offset_pct left_turn_sec -4.7500 0.3%
=== Summary Statistics: throughput_vph ===
green_sec:
Level N Mean Std Min Max
------------------------------------------------------------
15 4 1109.7500 285.1635 830.0000 1461.0000
60 4 1298.5000 94.2214 1216.0000 1423.0000
cycle_sec:
Level N Mean Std Min Max
------------------------------------------------------------
150 4 1237.2500 223.0970 933.0000 1461.0000
60 4 1171.0000 247.4847 830.0000 1423.0000
offset_pct:
Level N Mean Std Min Max
------------------------------------------------------------
0 4 1258.2500 242.0900 933.0000 1461.0000
50 4 1150.0000 218.0076 830.0000 1319.0000
ped_phase_sec:
Level N Mean Std Min Max
------------------------------------------------------------
10 4 1354.5000 110.6872 1215.0000 1461.0000
30 4 1053.7500 203.4574 830.0000 1236.0000
left_turn_sec:
Level N Mean Std Min Max
------------------------------------------------------------
0 4 1126.2500 288.8614 830.0000 1423.0000
20 4 1282.0000 119.7247 1215.0000 1461.0000
sensor_delay:
Level N Mean Std Min Max
------------------------------------------------------------
1 4 1206.5000 270.3510 830.0000 1461.0000
5 4 1201.7500 202.0947 933.0000 1423.0000
=== Main Effects: avg_wait_sec ===
Factor Effect Std Error % Contribution
--------------------------------------------------------------
ped_phase_sec 30.0000 8.1350 33.5%
green_sec -18.5000 8.1350 20.7%
left_turn_sec -15.5000 8.1350 17.3%
cycle_sec 14.0000 8.1350 15.6%
sensor_delay -10.0000 8.1350 11.2%
offset_pct 1.5000 8.1350 1.7%
=== ANOVA Table: avg_wait_sec ===
Source DF SS MS F p-value
-----------------------------------------------------------------------------
green_sec 1 684.5000 684.5000 1.542 0.2544
cycle_sec 1 392.0000 392.0000 0.883 0.3787
offset_pct 1 4.5000 4.5000 0.010 0.9226
ped_phase_sec 1 1800.0000 1800.0000 4.054 0.0839
left_turn_sec 1 480.5000 480.5000 1.082 0.3328
sensor_delay 1 200.0000 200.0000 0.450 0.5236
green_sec*cycle_sec 1 4.5000 4.5000 0.010 0.9226
green_sec*offset_pct 1 392.0000 392.0000 0.883 0.3787
green_sec*ped_phase_sec 1 480.5000 480.5000 1.082 0.3328
green_sec*left_turn_sec 1 1800.0000 1800.0000 4.054 0.0839
green_sec*sensor_delay 1 144.5000 144.5000 0.325 0.5862
cycle_sec*offset_pct 1 684.5000 684.5000 1.542 0.2544
cycle_sec*ped_phase_sec 1 200.0000 200.0000 0.450 0.5236
cycle_sec*left_turn_sec 1 144.5000 144.5000 0.325 0.5862
cycle_sec*sensor_delay 1 1800.0000 1800.0000 4.054 0.0839
offset_pct*ped_phase_sec 1 144.5000 144.5000 0.325 0.5862
offset_pct*left_turn_sec 1 200.0000 200.0000 0.450 0.5236
offset_pct*sensor_delay 1 480.5000 480.5000 1.082 0.3328
ped_phase_sec*left_turn_sec 1 684.5000 684.5000 1.542 0.2544
ped_phase_sec*sensor_delay 1 392.0000 392.0000 0.883 0.3787
left_turn_sec*sensor_delay 1 4.5000 4.5000 0.010 0.9226
Error (Lenth PSE) 7 3108.0000 444.0000
Total 7 3706.0000 529.4286
Note: Error estimated using Lenth's pseudo-standard-error (unreplicated design)
=== Interaction Effects: avg_wait_sec ===
Factor A Factor B Interaction % Contribution
------------------------------------------------------------------------
green_sec left_turn_sec 30.0000 14.7%
cycle_sec sensor_delay -30.0000 14.7%
cycle_sec offset_pct 18.5000 9.0%
ped_phase_sec left_turn_sec -18.5000 9.0%
green_sec ped_phase_sec -15.5000 7.6%
offset_pct sensor_delay -15.5000 7.6%
green_sec offset_pct -14.0000 6.8%
ped_phase_sec sensor_delay -14.0000 6.8%
cycle_sec ped_phase_sec 10.0000 4.9%
offset_pct left_turn_sec -10.0000 4.9%
green_sec sensor_delay -8.5000 4.2%
cycle_sec left_turn_sec 8.5000 4.2%
offset_pct ped_phase_sec -8.5000 4.2%
green_sec cycle_sec -1.5000 0.7%
left_turn_sec sensor_delay 1.5000 0.7%
=== Summary Statistics: avg_wait_sec ===
green_sec:
Level N Mean Std Min Max
------------------------------------------------------------
15 4 54.7500 27.7654 25.0000 86.0000
60 4 36.2500 15.3704 26.0000 59.0000
cycle_sec:
Level N Mean Std Min Max
------------------------------------------------------------
150 4 38.5000 20.5345 25.0000 69.0000
60 4 52.5000 26.1343 26.0000 86.0000
offset_pct:
Level N Mean Std Min Max
------------------------------------------------------------
0 4 44.7500 22.6035 25.0000 69.0000
50 4 46.2500 26.8871 28.0000 86.0000
ped_phase_sec:
Level N Mean Std Min Max
------------------------------------------------------------
10 4 30.5000 6.4550 25.0000 39.0000
30 4 60.5000 24.3653 28.0000 86.0000
left_turn_sec:
Level N Mean Std Min Max
------------------------------------------------------------
0 4 53.2500 28.9525 26.0000 86.0000
20 4 37.7500 15.3921 25.0000 59.0000
sensor_delay:
Level N Mean Std Min Max
------------------------------------------------------------
1 4 50.5000 27.8388 25.0000 86.0000
5 4 40.5000 19.8410 26.0000 69.0000
Optimization Recommendations
=== Optimization: throughput_vph ===
Direction: maximize
Best observed run: #1
green_sec = 60
cycle_sec = 60
offset_pct = 0
ped_phase_sec = 10
left_turn_sec = 0
sensor_delay = 5
Value: 1461.0
RSM Model (linear, R² = 0.8906, Adj R² = 0.2341):
Coefficients:
intercept +1204.1250
green_sec +103.8750
cycle_sec -7.1250
offset_pct -33.3750
ped_phase_sec +23.6250
left_turn_sec -54.1250
sensor_delay +150.3750
Predicted optimum (from linear model, at observed points):
green_sec = 60
cycle_sec = 60
offset_pct = 0
ped_phase_sec = 10
left_turn_sec = 0
sensor_delay = 5
Predicted value: 1529.3750
Surface optimum (via L-BFGS-B, linear model):
green_sec = 60
cycle_sec = 60
offset_pct = 0
ped_phase_sec = 30
left_turn_sec = 0
sensor_delay = 5
Predicted value: 1576.6250
Model quality: Good fit — general trends are captured, some noise remains.
Factor importance:
1. sensor_delay (effect: 300.8, contribution: 40.4%)
2. green_sec (effect: 207.8, contribution: 27.9%)
3. left_turn_sec (effect: -108.2, contribution: 14.5%)
4. offset_pct (effect: -66.8, contribution: 9.0%)
5. ped_phase_sec (effect: 47.2, contribution: 6.3%)
6. cycle_sec (effect: 14.2, contribution: 1.9%)
=== Optimization: avg_wait_sec ===
Direction: minimize
Best observed run: #1
green_sec = 60
cycle_sec = 60
offset_pct = 0
ped_phase_sec = 10
left_turn_sec = 0
sensor_delay = 5
Value: 25.0
RSM Model (linear, R² = 0.8786, Adj R² = 0.1500):
Coefficients:
intercept +45.5000
green_sec -9.5000
cycle_sec +5.2500
offset_pct +4.2500
ped_phase_sec -6.7500
left_turn_sec +0.7500
sensor_delay -15.0000
Predicted optimum (from linear model, at observed points):
green_sec = 15
cycle_sec = 150
offset_pct = 0
ped_phase_sec = 10
left_turn_sec = 20
sensor_delay = 1
Predicted value: 78.5000
Surface optimum (via L-BFGS-B, linear model):
green_sec = 60
cycle_sec = 60
offset_pct = 0
ped_phase_sec = 30
left_turn_sec = 0
sensor_delay = 5
Predicted value: 4.0000
Model quality: Good fit — general trends are captured, some noise remains.
Factor importance:
1. sensor_delay (effect: -30.0, contribution: 36.1%)
2. green_sec (effect: -19.0, contribution: 22.9%)
3. ped_phase_sec (effect: -13.5, contribution: 16.3%)
4. cycle_sec (effect: -10.5, contribution: 12.7%)
5. offset_pct (effect: 8.5, contribution: 10.2%)
6. left_turn_sec (effect: 1.5, contribution: 1.8%)